研究テーマ
-
道路領域検出と画像レジストレーションに基づく自車両位置推定
Vehicle pose estimation based on road area detection and image registration自動運転の位置推定は,グローバル地図上で自車両の現在位置と進行方向を推定するものである.
自動運転に必要とされる推定精度の最低レベルは,自車両がどの車線を走行しているのかが判断できるレベルだと言われている.
そこで多くの研究では,グローバル地図に3次元地図を採用している.高精度な3次元地図を利用することで,多数の障害物が存在する複雑な環境下でも精度良く位置推定が可能だと考えられているからである.
しかし,この手法は3次元空間の観測点と3次元地図との対応関係を求める必要があるため,観測点の2乗の演算負荷がかかる.また,3次元地図作成と維持に多大なコストが必要となるだけでなく,地図情報を車載することによるメモリ消費も看過できない.
一方でGoogle mapに代表される2次元地図は広く一般に普及しているため,入手が容易であり,車載地図として利用しやすい.
2次元地図は道路や歩道,建造物などの境界線から構成されている.そのため2次元地図を用いた自己位置推定では,走行環境中の白線や縁石などの道路境界線を検出し,2次元地図上の境界線との位置合わせを行う手法が一般的である.
反対にノイズの影響を小さく抑えようとすると,不検出が増える.境界線の誤検出や不検出が発生すると自己位置精度は大幅に劣化するため,境界線検出には様々な対策が検討されている.
しかし根本的な解決には至っておらず,道路境界線を用いた自己位置推定は難しい課題となっている.
画像処理の拡張現実の分野では,点群をつなぎ合わせたメッシュ情報を用いることで,単純に点群位置合わせを行うよりも外乱安定性が向上することが明らかにされている.
境界線の点群を検出するのではなく,検出された点群を領域と捉えることで,境界線の誤検出や不検出は根本的に発生しなくなる.
換言すると,「境界線には自己位置を推定するための情報が集約されており,確実に検出できれば精度の良い推定が可能になるが,“線”の情報であるため,確実な検出が難しい.
一方,領域は“面”の情報であり,各点の持つ情報は少ないが,少々の不検出が生じても影響が少ない」ということである.
そこで本研究では演算負荷を小さく抑制しつつ,高い精度で自車両の位置・姿勢を推定するために,境界線(線)ではなく道路領域(面)に基づく自己位置推定手法を提案する.
The general approach for localization is to match the lane lines between the map and the real world.
However, such approaches suffer from changing the environmental conditions and painting clearance.
If considerable changes occur, the false-detection rate increases due to noises and miss-detected lines.
In order to solve this issue, a localization method based on the holistic road area detection is proposed.
First, the road area is extracted from a predefined 2D boundary map.
Next, the real world road area is detected using LiDAR and converted into the binary image plane.
Finally, an image registration technique is applied to calculate the overall matching score of the road area between the map and LiDAR images.
The proposed method has provided an accurate estimation against environmental changes with low-cost calculation based on the simulation results.
In addition, the validation of the proposed method in the real world has performed less than 0.2m for the estimation error.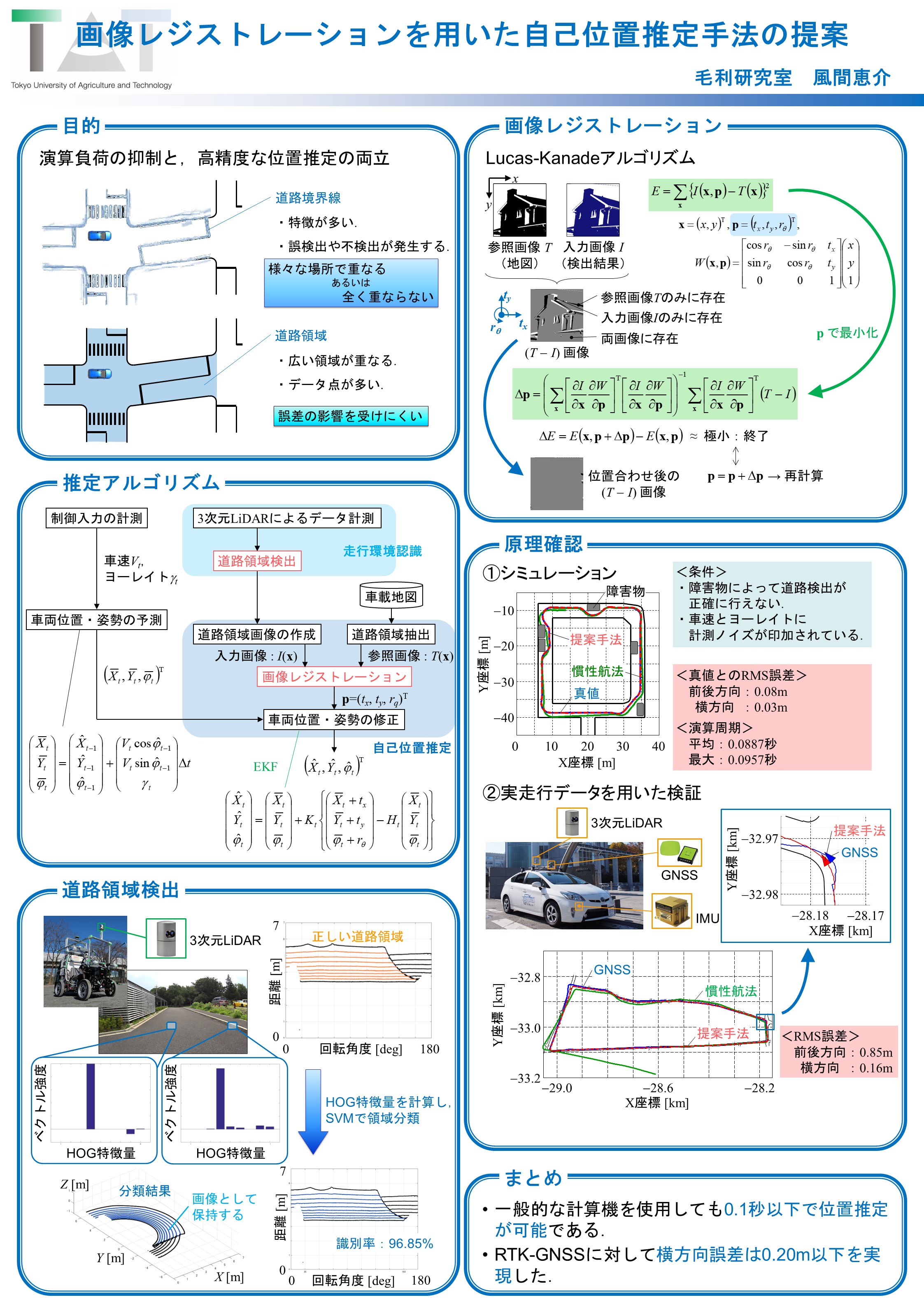
-
市街地での自動運転を想定した目標経路生成と操舵角・車速制御
近年、高齢者の移動手段や交通容量の拡大、環境負荷の低減といった観点から自動運転技術の開発が社会的にも求められており、各国研究機関の技術的開発も盛んに進んでいる。
高速道路に比べ、市街地での自動運転は道路環境が複雑であるため、環境認識技術の精度向上、また大きな曲率を有する道路での適切な操舵角制御や加減速制御など、いまだ取り組むべき課題が多く存在する。
その中でも、交差点を滑らかに曲がるというのは簡単なようで難しい課題の一つである。本研究では、道路の点と線のみの情報で構成されるカーナビのような簡易道路地図を利用し、交差点をより滑らかに右左折するための目標経路を自動で生成する。
また、走行時のセンサ情報と統合して乗員の乗り心地も考慮した最適な操舵角・車速制御に取り組んでいる。更に、当研究室で所有する実験車両に構成したアルゴリズムを搭載し、実車実験を行うことでその妥当性を検証している。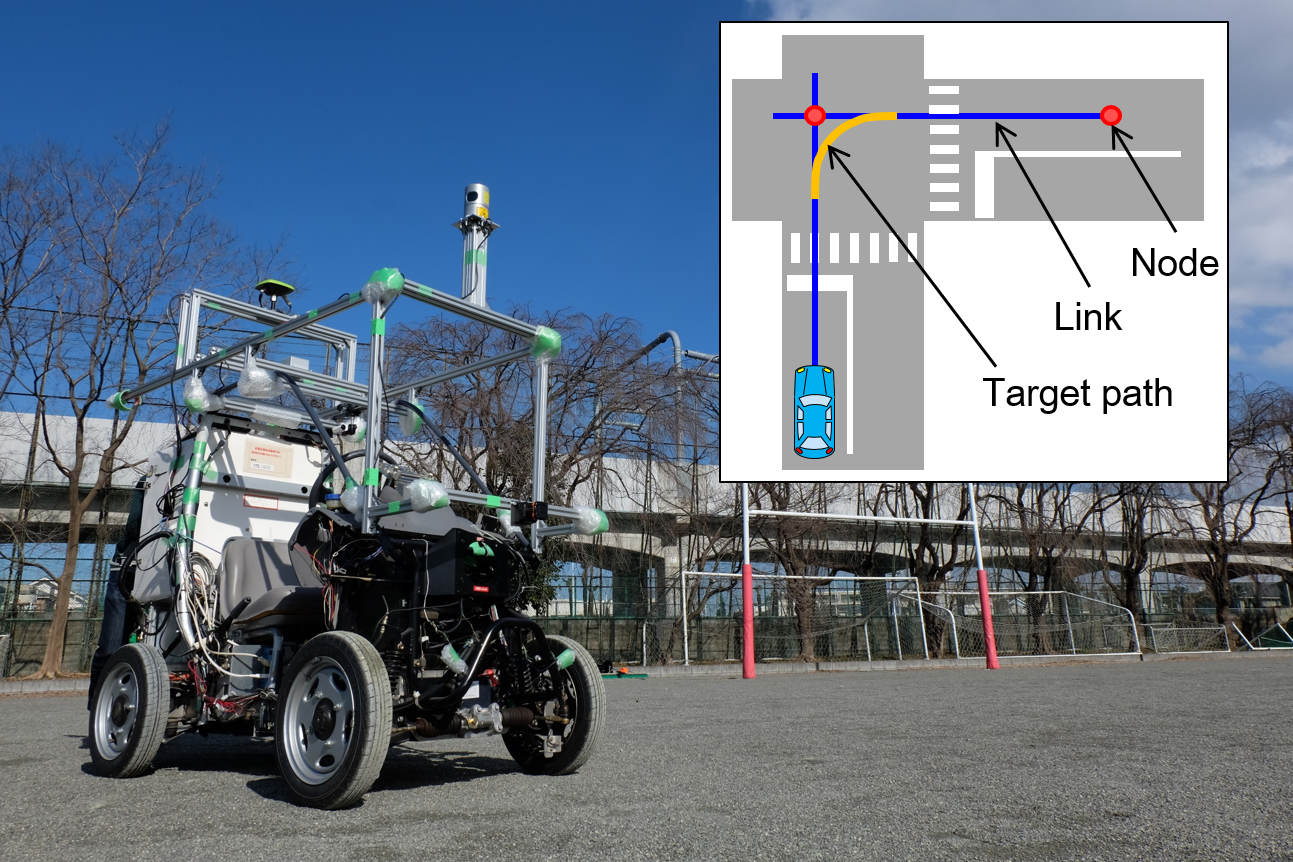
-
路面摩擦係数に応じた衝突被害軽減ブレーキの提案
近年,予防安全技術を搭載した車両が市場に出回り,その中でも,「衝突被害軽減ブレーキ」による事故防止効果が注目されている.
しかしながら,雨の日の路面や雪道では,制動距離が通常よりも伸びることなどにより,通常と同等の速度減少効果を期待できない可能性がある.
そこで,本研究では,路面状況を推定する技術を確立し,どのような路面状況でも通常走行時と同等の効果が期待できる「衝突被害軽減ブレーキ」を提案します.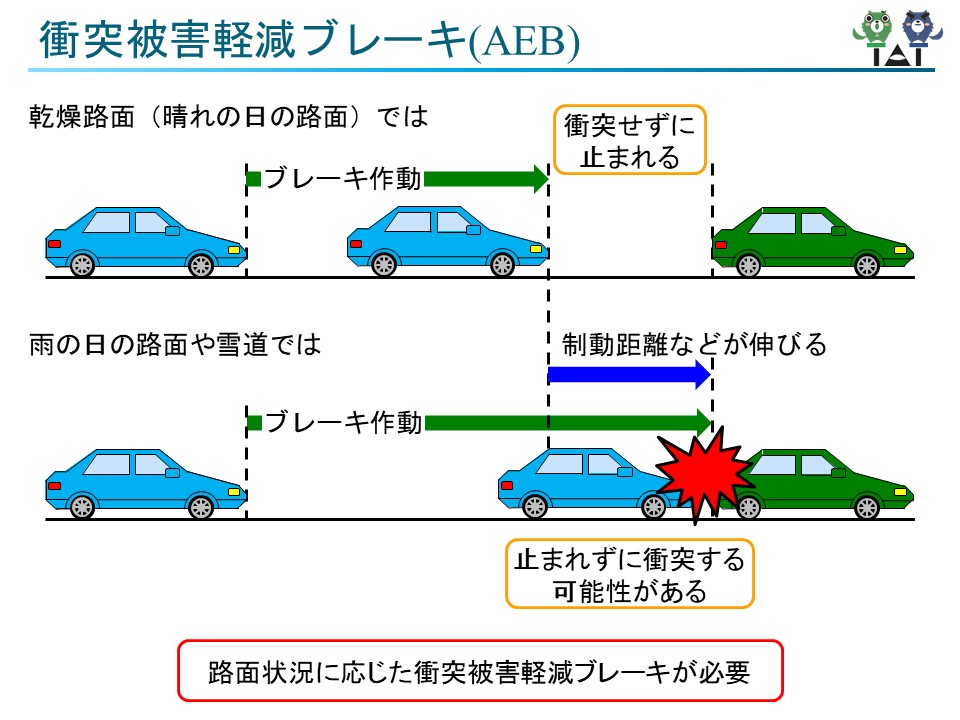
-
交差点右折時における歩行者事故発生要因分析
交通事故は,年間約50万件発生しており,死亡者はおよそ4,000人にものぼる.
交通事故における死亡者の状態別割合では,歩行中に死亡事故に遭うケースが最も多く,それらの半数以上は交差点で発生している.
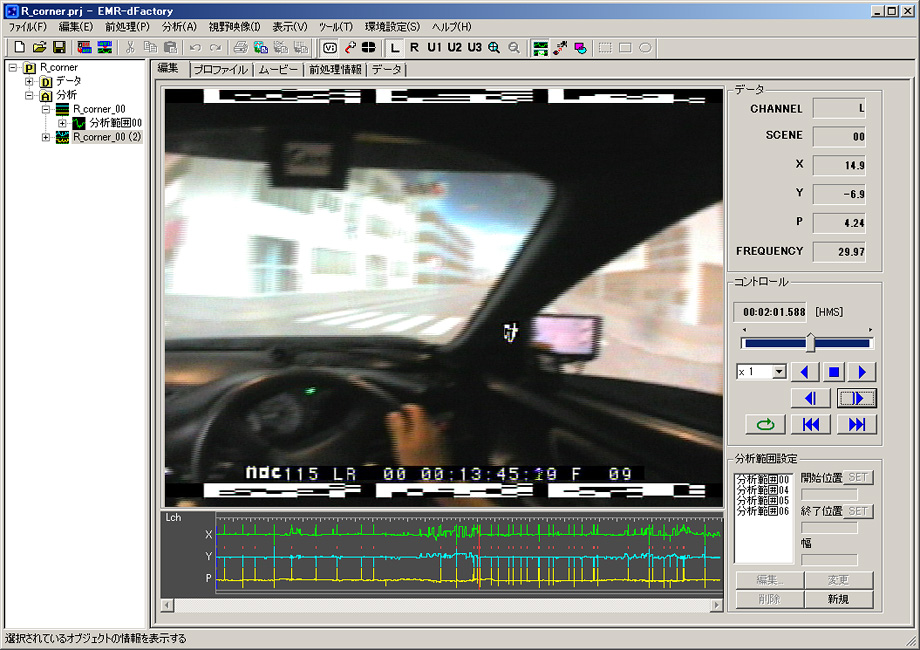
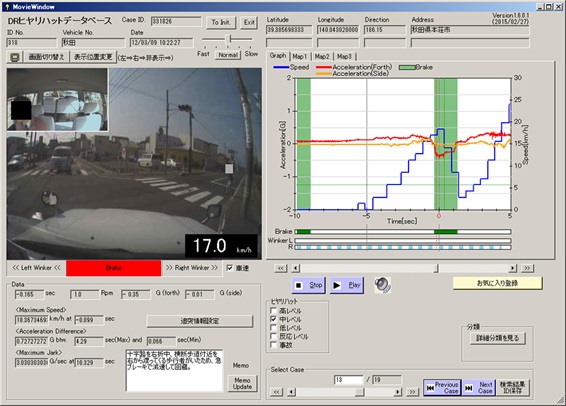
本研究では,歩行者事故の中でも交差点右折事故に着目し,事故要因の分析を行っている.
分析ではドライブレコーダに記録された映像データを用いることで,事故統計を用いた事故分析には困難である詳細な分析を実現している.
また,ドライビングシミュレータを用いて被験者実験を実施することで,運転時のドライバの行動を観察し,事故発生に至るメカニズムを解析している.
-
協調運転における操舵支援システムの開発
近年,半自動運転として運転作業の一部を自動化した自動車が市販され始めています.
半自動運転においてドライバはシステムの監視義務があります.しかし,ドライバがシステムを過信することで監視義務を放棄し,事故が発生していることが問題になっています.
そこで,協調運転というコンセプトを用いた操舵支援システムの開発をしています.
協調運転は古くから提唱されている考え方で,基本的にはドライバが運転し,システムがそれを力やトルクなどでアシストするという方式です.
協調運転では常にドライバが運転業務を行うため,安全性の高いシステムになっています.
現在の研究では,操舵における支援トルクの算出アルゴリズムや与え方を工夫することでより支援効果を高めることについて研究しています.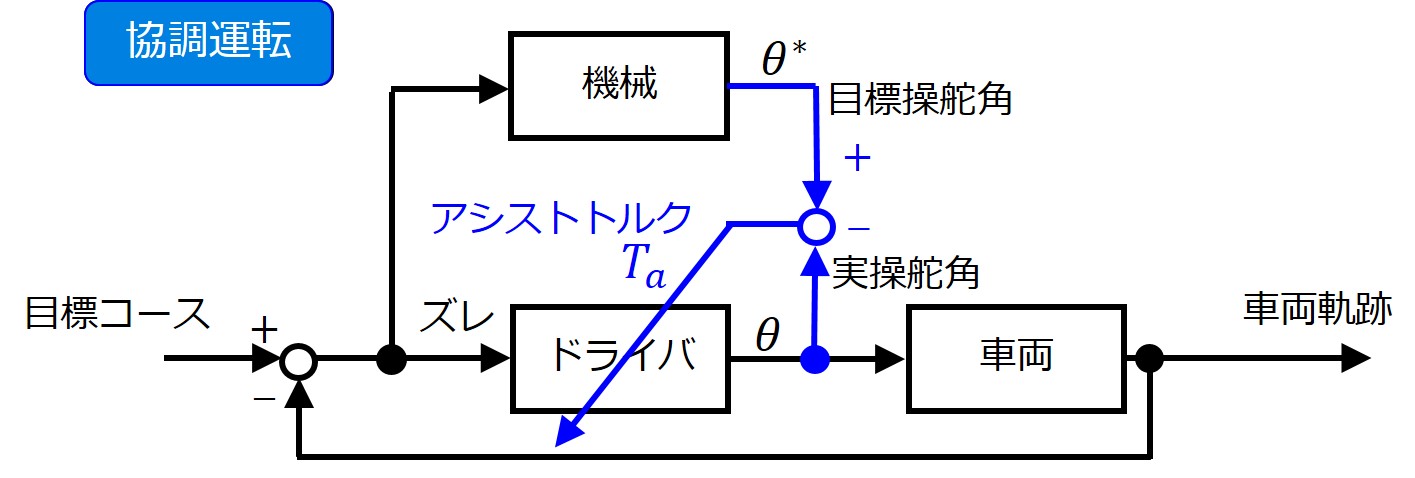
-
オーソリティマップ上での自車位置推定技術とマップの逐次更新手法の設計
GoogleやDaimler,トヨタ自動車に代表されるように,国内外の研究機関で自動運転プロジェクトが活発に動き始めている.
自動運転において,自車両の現在位置を正確に把握する技術が重要である.自己位置推定の近年の主流は高精度地図を活用するものとなっているが,この方法では地図作成のための事前走行とデータ処理が必要となる.
さらに,道路工事などで環境に変化が生じた場合,自己位置推定の精度が保証できないことから,SLAM同様,地図生成を位置推定と同時に行う手法も必要となる.また,車載センサに依存した地図を生成しているため,汎用性のない手法となっている.
本研究では,国土交通省が整備を進める「道路基盤地図情報」をベースにしたオーソリティマップと,車載センサで計測される車両位置や周囲の環境情報を統合し,自車がオーソリティマップ上のどこにいるかを確率的に推定する手法を設計する.さらに,自車両が観測した情報を逐次マップに反映させ,マップが常に最新の状態に保たれる仕組みを提供する.

-
新操舵系の開発
運転操作不適による自動車事故は毎年一定数発生しており,中でも若い運転者と高齢運転者の占める割合が非常に高い.つまり,運転に不慣れな者や運転に不安を抱える者にとって,現在の運転操作系は必ずしも直感的に操作できているとは言い難い.
そこで,本研究では自動車向けの新しい運転操作系開発を行っている.ステアバイワイヤ技術の登場により,運転操作系は設計自由度が飛躍的に向上し,その形状自体も変更可能となった.
そのような中で我々は人間本来の性質に適合した直感的で負担の少ない操作系の開発を目指している. また,様々な属性の運転者のハンドル操作を計測し,現在の運転操作系における問題点の分析も行っている.


-
Neural networkを用いたHMIフィルタの開発
私はニューラルネットワークを使った新しい運転システムの開発を行っております.
人間—車両系において,車両応答のゲインと位相が系の性能を大きく左右することは古くから知られています.ゲインと位相はそれぞれ車の応答性,速応性を表しており,高周波ゲインが増大すると位相遅れが生じ,系の速応性や安定性を劣化させ,自動車の運転しにくさにつながります.
しかし,位相とゲインにはトレードオフの関係があり,高周波ゲインを下げると位相遅れが大きくなるという問題が生じます.本研究では,ニューラルネットワークを用いて,ゲインと位相がトレードオフの関係を持たないコントローラを作成することを目標としています.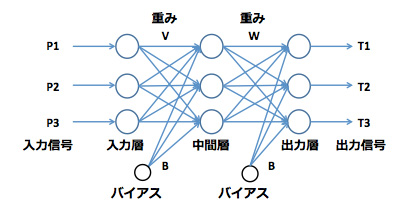
-
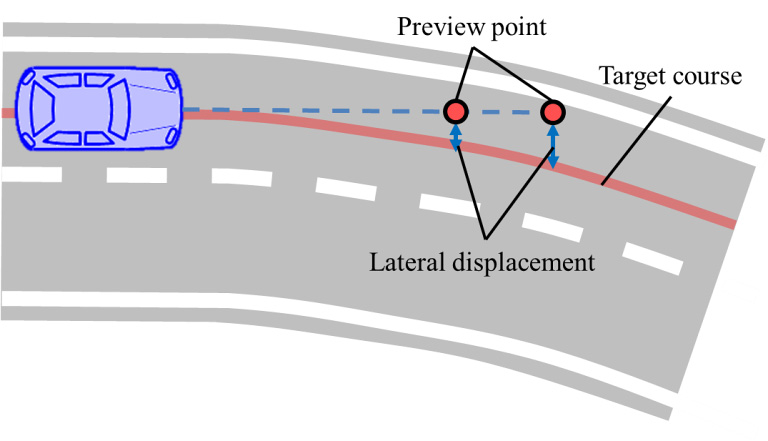
複数の前方注視点を用いた車線追従制御システムの開発
近年,車線追従制御の一つとして前方注視点を用いた手法が提案されている.車両に搭載されたカメラにより車線を認識し,前方注視点における目標コースからの誤差から目標ヨーレートを算出する手法であるが,コースの追従動特性に制限があることが指摘されている.
本研究では,先に述べた問題点の対策として,複数の前方注視点を用いる手法を提案し,追従動特性を自在に設計できるともに,より近傍の前方注視点を用いても車線追従が可能となることを確認する.また,ドライビングシミュレータを用いた実験において,制御系のパラメータが性能に及ぼす影響の評価を行い,本手法の妥当性を明らかにする.
-
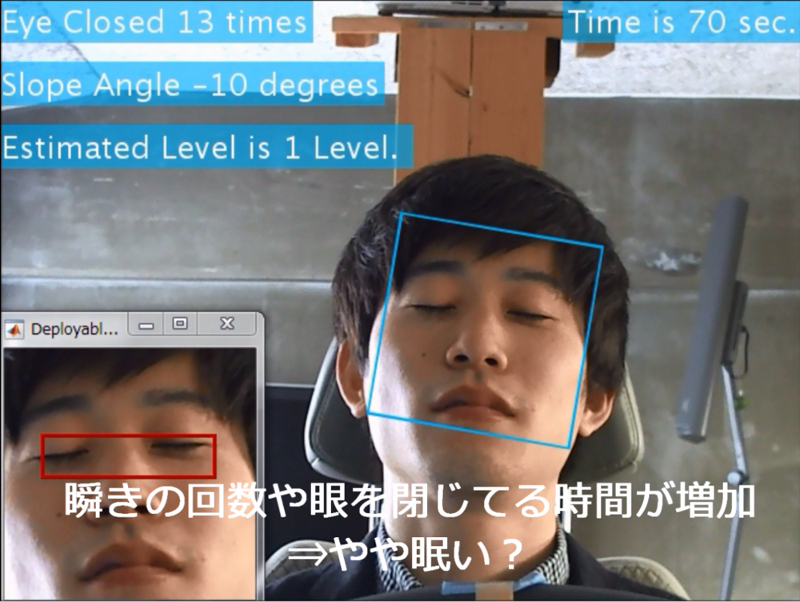
自動運転時におけるドライバモニタリングシステムの開発
近年,クルマの自動運転化が急速に進んでいます.それに伴い,万が一,自動運転車が事故を起こした場合,ドライバとシステムどちらの責任なのかが問題となってきました.そこでNHTSA(米国運輸省道路交通安全局)は自動運転をレベルごとに分け,責任の所在を定義しました(表1).
本研究は,自動運転レベル2(手足は自由になるがドライバは常時,周囲状況の監視責任を負う.いざという時は瞬時に運転に介入する.)をターゲットとし,ドライバが周囲監視を怠らないようにモニタリングするシステムを研究しています.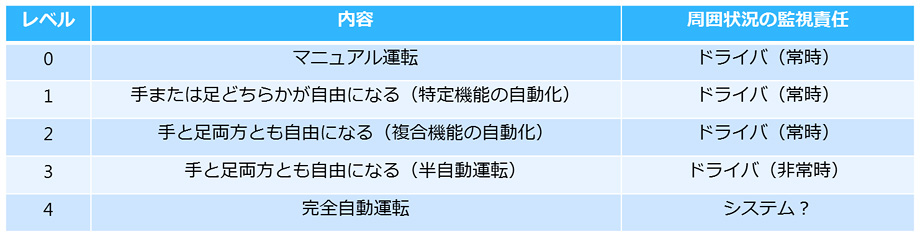
-
拡張カルマンフィルタを用いた自動運転自動車の自己位置推定法
近年,自動車業界において自動走行車両の開発は最もホットな分野の1つです.Google社が自動走行車両の開発に参入したことが大きなきっかけとなり,今では世界各国のメーカーがその開発に競うように取り組んでいます.
当研究室では小型電気自動車を所持しています.その車両にGPSやジャイロセンサ,車速パルスセンサなど取り付け,車両の運動特性を実際の走行実験によって計測し,自動走行アルゴリズムの開発を行っています.
まずは大学構内のモデルコースでの自動走行を目標とし,いずれは車両の動特性なども踏まえて公道での走行実現を目指しています.
-
後退時における新しい操舵系の操作性に関する考察
今日普及している自動車の丸形状ステアリングは,持ち替えが必要であることや操作量が多いことにより,初心者にとって扱いにくいものと考えられます.そこで,初心者でも直感的に操作できる新しい形状の操舵系を開発しています.具体的には自転車やバイクに近いバー形状のハンドルを提案しており,その優位性について様々な面から研究を進めています.
現在の研究内容は,実験車両のブレーキシステム製作および提案する新操舵系の後退・駐車時における優位性の検証です.被験者実験による統計的な優位性の確認や,形状の違いによる操作への影響について研究をしています.
-
路面摩擦係数に依らない実路でのタイヤ状態推定の提案
私が行っている研究は,車両の挙動からタイヤ状態推定を行い,車両の安定性を評価することです.
路面が凍結したり,大雨で道路が濡れて,滑りやすく(路面摩擦係数が低下する)なり,スリップ事故などが発生しています.このような事故を起こさないために横滑り防止装置(ESC)もありますが,実際に危険な状態(ハンドル操作ができない状態)になってからしか制御をすることができません.
そこで,危険な状態になる前に制御を行えるように車両運動(Vehicle Dynamics)の勉強を行いながら研究を行っています.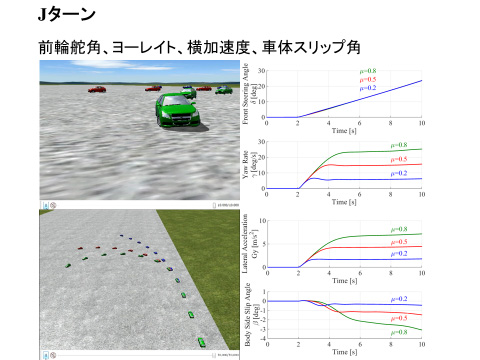
-
ドライブレコーダを用いた交差点事故の要因分析
事故統計によると,近年の死亡事故件数は減少傾向にあるが依然として4000件を超えています.その中で最も高い割合を占めるのは,歩行中に死亡する交通事故です.歩行者死亡事故の半分以上が交差点で起きており,これは交差点が危険で複雑な場面であることを示唆しています.
このような事故を予防するために,本研究では交差点事故の要因を分析しています.また,分析ではドライブレコーダに記録された映像データを用いることで,事故統計を用いた事故分析には困難である詳細な分析を実現しています.