新着情報
神奈川工科大学公道での実証実験の開始のお知らせ
東京農工大学公道での実証実験の開始のお知らせ
公道でのデータ収集のお知らせ(東京大学)
第3回S-イノベシンポジウムを開催します.
日時: 2017/8/23(水) 13:00~18:30
会場: 神奈川工科大学情報学部棟12F
ポスター[PDF]
詳細はこちら
プロジェクトについて
本プロジェクトは,科学技術振興機構 (JST),戦略的イノベーション創出推進プログラム(S-イノベ)の研究開発テーマ「高齢社会を豊かにする科学・技術・システムの創成」において,平成22年度に採択され,最長10年間の研究開発期間を予定しています.
↑ ページトップ
開発の狙い
高齢者が自立して元気に生活していくためには安心安全な移動手段が欠かせず,中でも自動車は日常の足として大変重要と考えられます. 特に,地方地域のように歩ける範囲だけでは生活できず,また公共交通の貧弱なところでは,自動車運転が必須となっています. しかしながら,加齢による身体能力の低下によって,事故の危険リスクが高まります. 実際,高齢者の交通事故数は上昇傾向にあり,また高齢運転者数も今後20年で倍増することが確実視されています. そこで,高齢者の日常生活を支える意味において,安全安心な移動の達成をゴールとして,その手段に,センサー技術,危険予知判断技術,危険回避技術などの研究開発とともに, このシステムの実証実験により効果評価や社会的受容性の検証を行うことで,高齢者の運転能力の低下をバックアップし,事故を回避する自律運転知能を持つ安全運転支援システムの確立とその市販化を目指しています.
↑ ページトップ
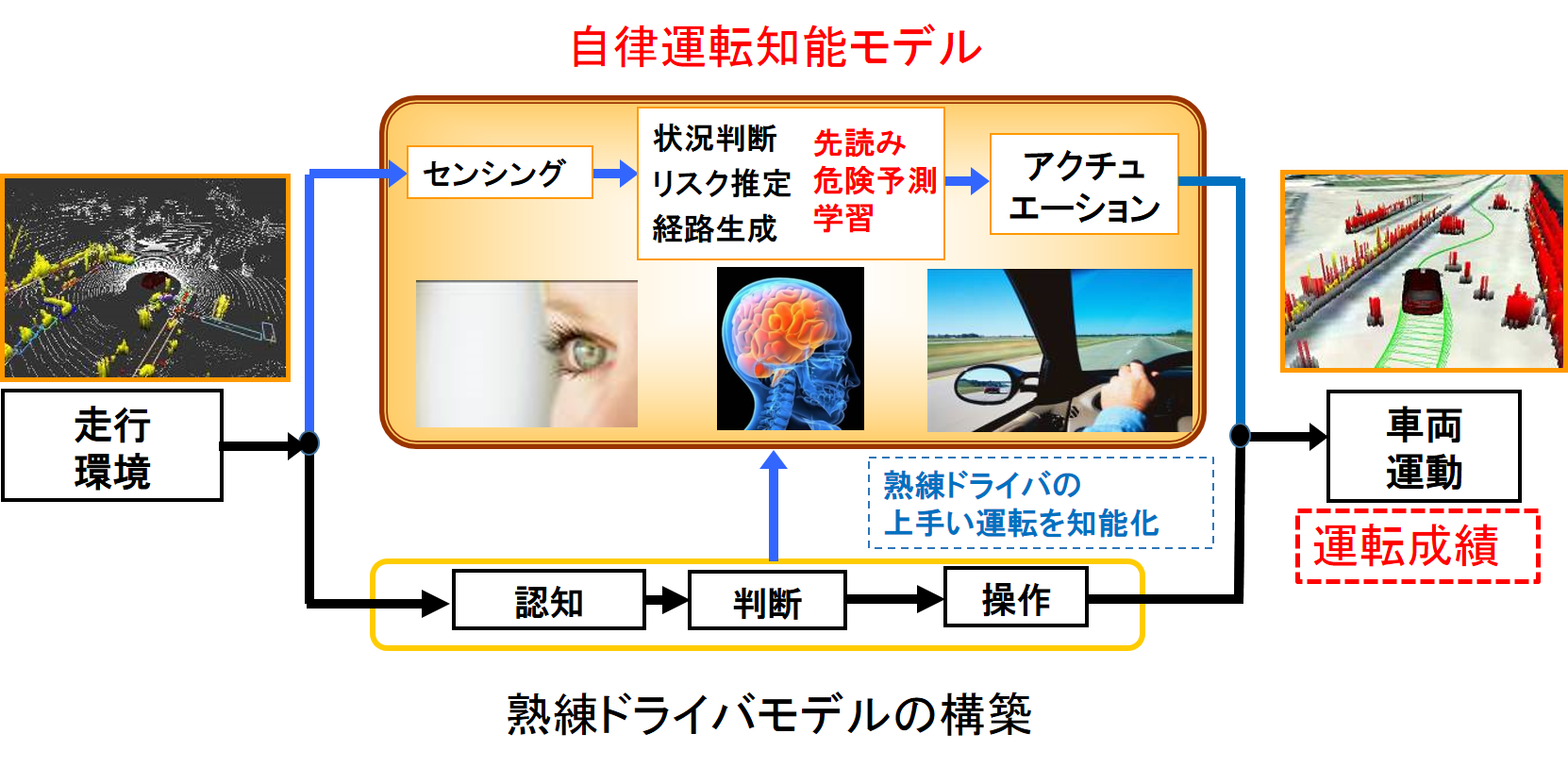
研究開発「自律運転知能システム」の全体コンセプト
本研究では,高齢者の日常生活の移動支援を最重点課題として設定し,高度運転支援の機能の範囲を限定することにより早期実現・社会導入を目指している.
高度運転支援システムの基盤技術の柱としては従来の予防安全技術に加えて,高精度の道路環境センシング技術(画像,LIDAR, レーダ,GNSS),デジタルデータ(地図データ,周辺映像データ),自律運転知能化技術(周辺認識,知識データベース,リスクポテンシャル予測),高齢運転者診断技術(ドライバモデル,ドライバ受容性),運転操作系HMI最適化技術などが挙げられる.
これらの技術を有機的に統合し,高齢者による危険回避が困難と判定した際に自律運転知能による強制介入制御を実施する.活用用途としては,地方地域の高齢者のモビリティ支援としての安全自動車を当面の目標とし,
技術開発は継続的に行い,動作範囲の拡張やさらなる高機能化を実現していくことを目指す.
実現可能性へのハードルの高い完全自動運転を目指すのではなく,運転者が主で機械支援が従のシステムであるので,運転者の受容性や社会受容性は十分検討する必要があるものの,実現可能性は十分高い.
本プロジェクトで最終的に目指す事故防止機能としては,高齢者の日常生活エリアでの比較的低速走行を対象とし以下の機能を有するものとする.
- ・ 先行車への追突回避
- ・ 自転車や歩行者への衝突回避
- ・ 走行レーンからの逸脱回避
- ・ 非優先交差点での一時停止無視への制御介入
そのため,ドライブレコーダで取得したヒヤリハットシーンにより、交通事故死者の多い典型的なシーンのリスクシナリオを設定する。なお車両単独の自律制御による運転支援を基本とするが,車車間,路車間情報も活用できるシステムを構築する.