
研究テーマ一覧
自律運転知能システム
熟練ドライバの運転知能モデル構築
障害物回避制御のシステム設計
早期制御介入に関するドライバ受容性の検討
適応型HMIの開発
受容性評価
ドライバ運転行動の受容性検討
社会レベルでの受容性検討
自律運転知能システム
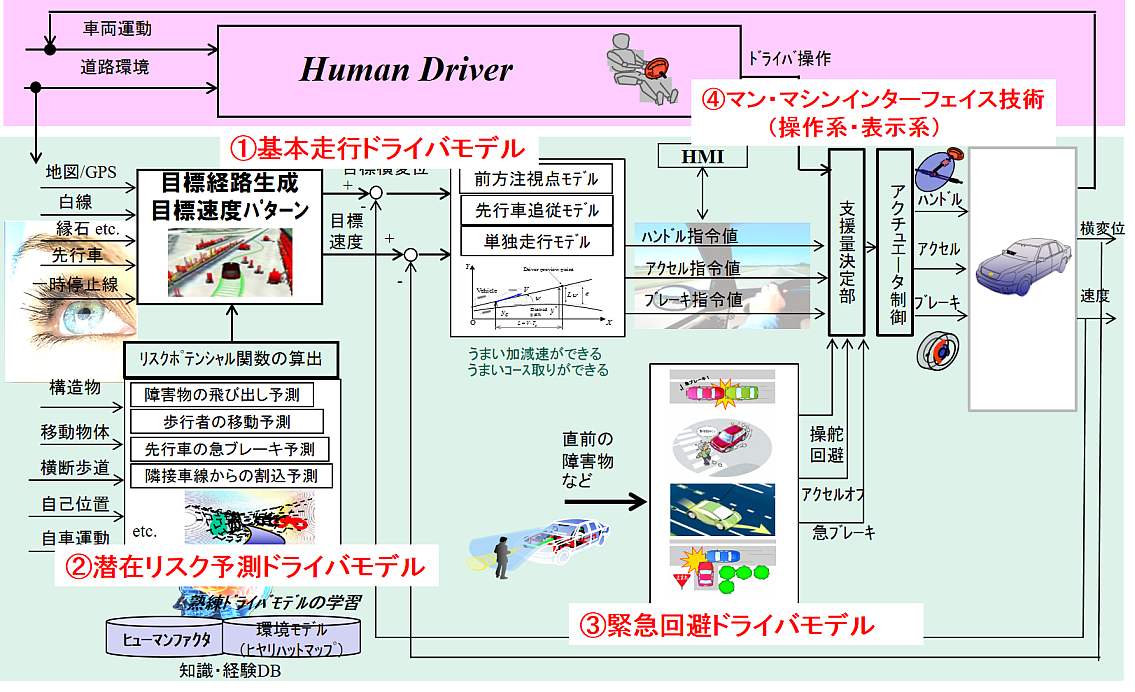
高齢者の運転機能低下を補償するために,熟練ドライバの運転行動と比較し,リアルタイムの安全運転診断あるいはその規範行動に追従させるような各種操作系インターフェースを開発することを目的としている. 熟練ドライバの運転を模擬し,①基本走行ドライバモデル,障害物回避等を行う②潜在リスク予測ドライバモデル,歩行者の飛び出し等に対応した③緊急回避ドライバモデルを構築し,各種ドライバモデルを基に④操作系・表示系HMIの開発を行う.
熟練ドライバの運転知能モデル構築
基本走行ドライバモデル
市街地道路に沿って走行できるようにセンサ・認識系の取得データに基づく経路生成及び運動制御系を構築した.狭い交差点のコーナに置いてもクロソイド曲線の概念を取り入れて,前方注視点ドライバモデルによってスムーズにコーナを曲がれる操舵制御モデルを開発した.
潜在リスク予測ドライバモデル
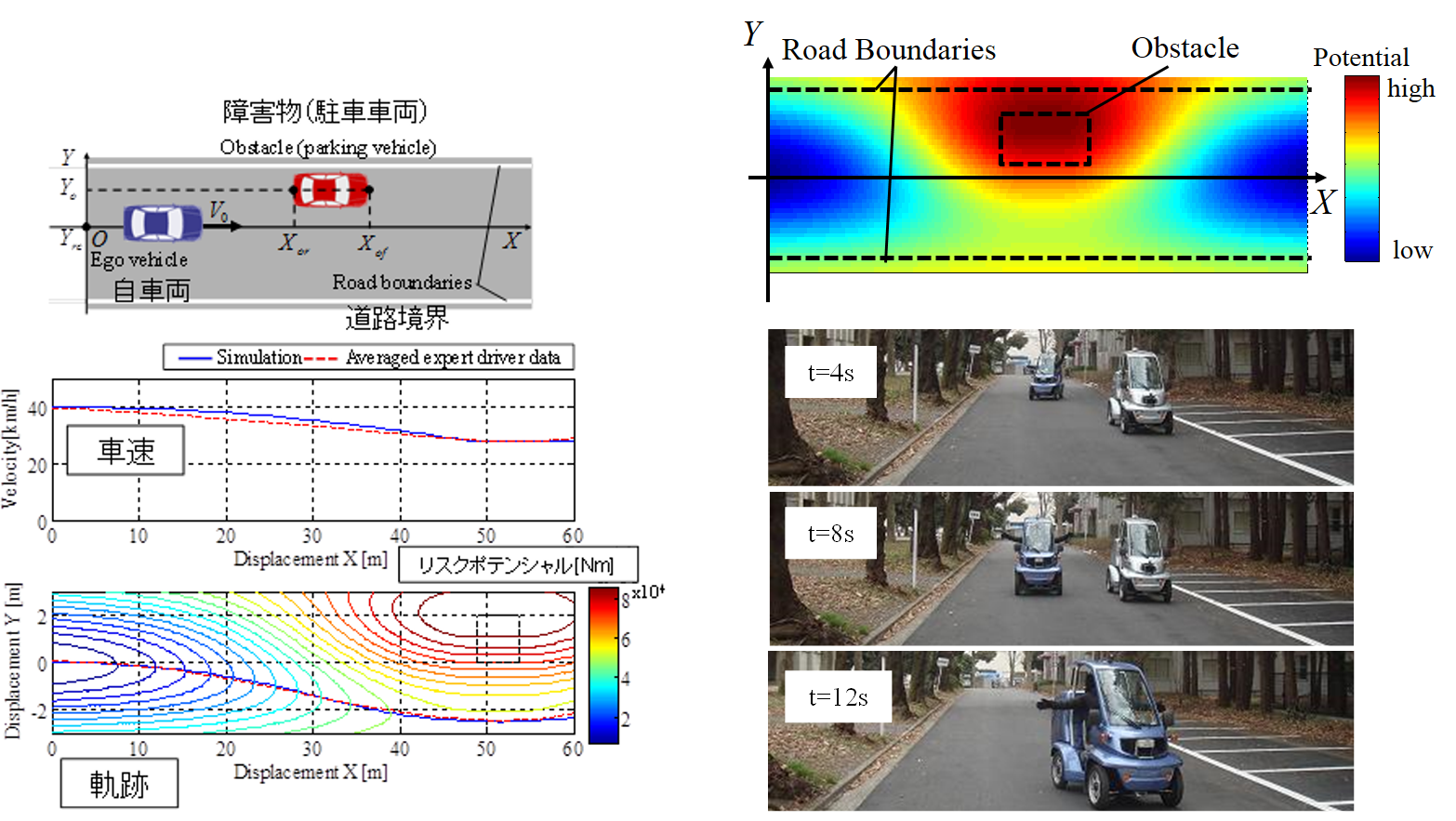
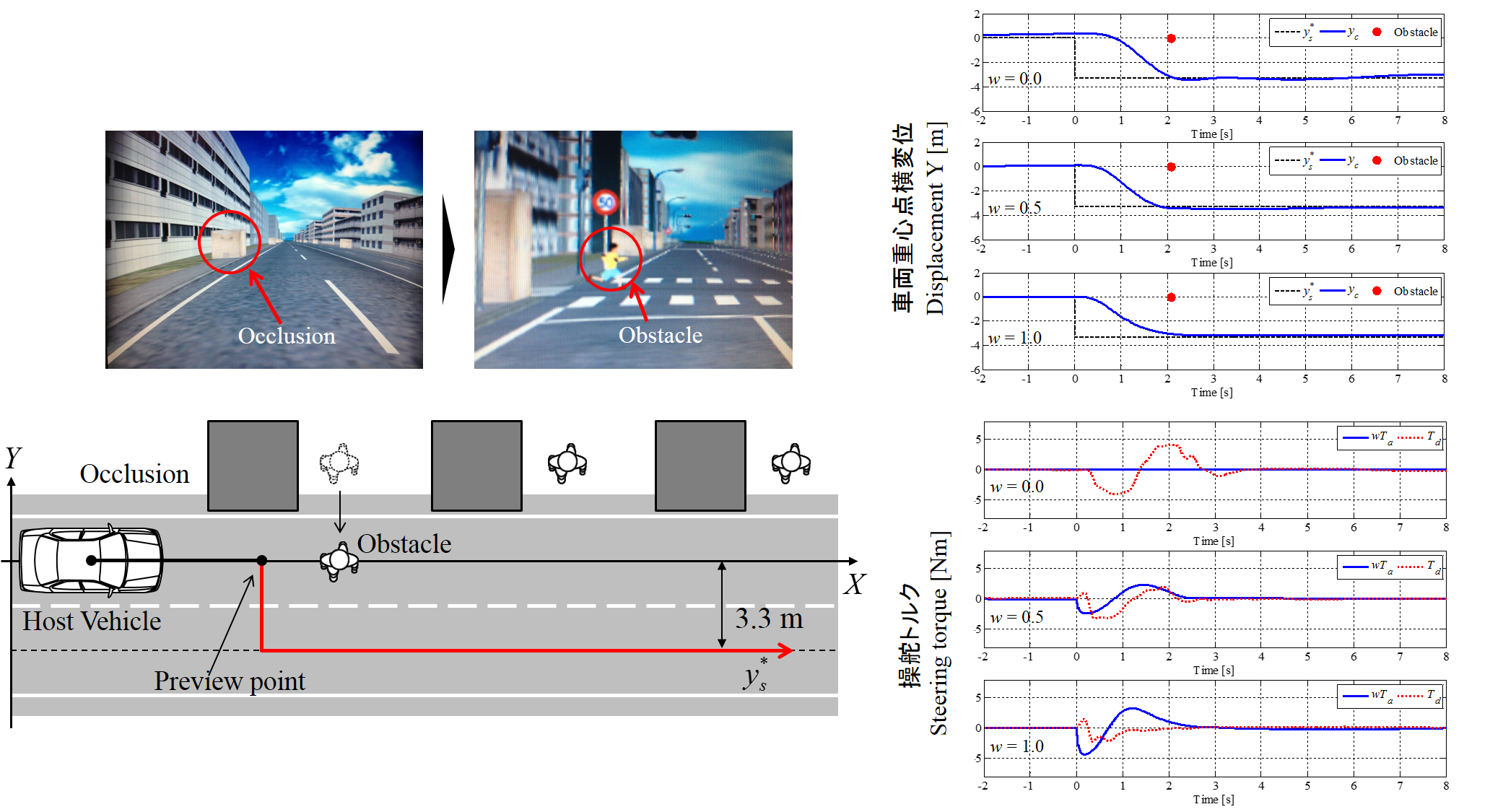
近年,自動ブレーキシステムの研究・開発は盛んに行われているが,今後さらなる安全性能の向上のためには直接検知できないリスクの評価が重要となる.そこで本研究では,規範ドライバの危険予測運転を模擬したリスク評価手法の確立とそれに基づく自律運転知能システムの開発を目的とする.その一環として障害物回避場面に注目し,道路境界や障害物といった見えるリスクだけでなく,障害物の死角からの歩行者の飛び出しのような見えないリスクもリスクポテンシャルとして表現する.そして,最適制御理論を組み合わせた運動計画によって衝突リスクを最小化することで目標ハンドル角と目標減速度を算出し,車両運動を制御する.
↑ ページトップ
障害物回避制御のシステム設計
近年,衝突安全技術の発達により,交通事故における死亡者数は著しく減少しているものの交通事故件数自体は未だに多いのが現状である. これは認知遅れや判断ミスにより,ドライバの約4割が事故時に回避行動をとっていないことが原因とされている. このような事故を低減させるためには,状況に応じた回避行動を支援するシステムや,自動で回避行動を行うシステムが有効であると考えられる. 本研究では,歩行者の飛び出し場面を対象とし,レーザレーダを用いて歩行者を検知し,その移動予測を行うことで将来位置を算出する.算出した歩行者の予測位置を基に適切な回避方法と回避軌道を理論的に導出し,操舵制御を行うことで歩行者の回避を行う.
↑ ページトップ
早期制御介入に関するドライバ受容性の検討
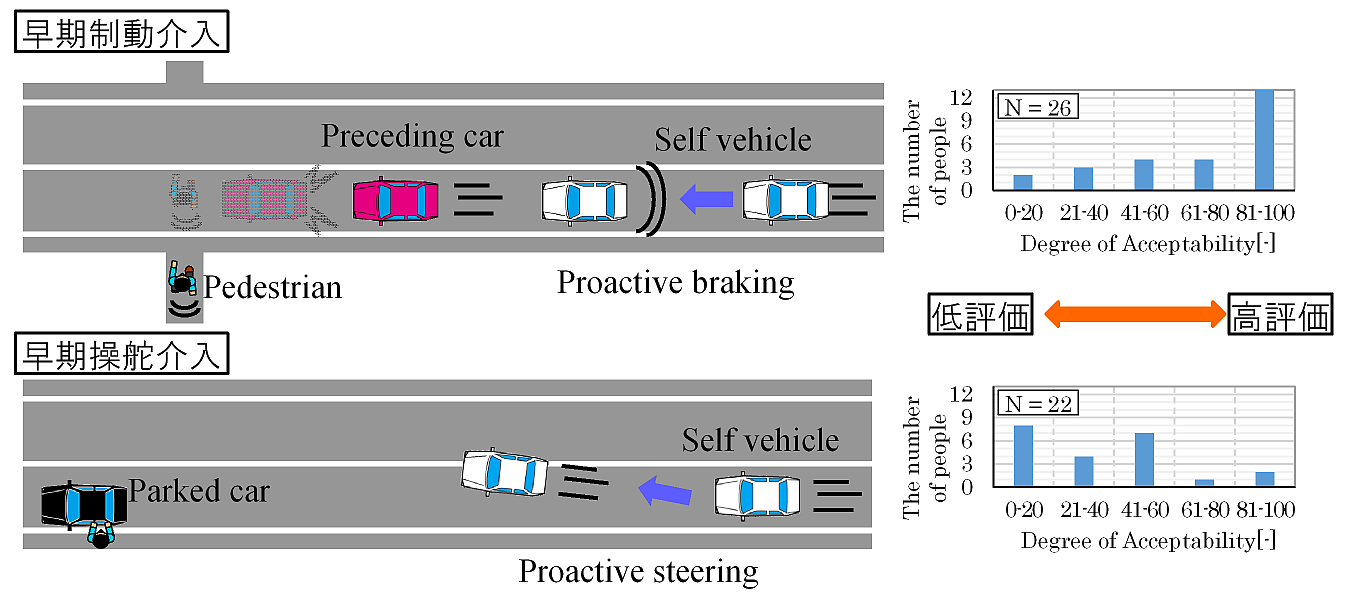
運転能力の低下した高齢ドライバを総合的に支援するためには,自律運転知能による積極的な車両制御への介入の検討が必要となる.早期の制御介入の具体的な方策としては,制動への介入と操舵への介入が考えられ,それぞれの状況において自律運転知能が周辺環境のセンシングを行い,その状況のリスクを評価し,それらに基づいて必要な車両制御を実行する.この際に懸念される問題の一例として,高齢ドライバと自律運転知能の各種の能力の差によって,自律運転知能が危険と判断した状況を高齢ドライバが適切に認識・評価出来ていないケースが考えられる.この場合,高齢ドライバ側からは自律運転知能が不必要な制御を実施している様に見える場合があり,それが原因となって受容性が低下する可能性が考えられる.本研究では,このようなケースも含めて,高齢ドライバが早期の制御介入を体験した際にどの様なメカニズムでシステムに対する受容と非受容が発生するのか,という点に注目し,ドライビングシミュレータを活用した評価実験を実施した.実験結果として,早期の制動介入は比較的評価が高いものの,操舵介入は低評価が多く観測された.また,非受容の原因に関しても評価を行い,今後の設計や評価実験において受容性を改善するための方策に関する知見を得た.

↑ ページトップ
適応型HMIの開発
自律運転知能システムのオーバーライド機能評価システムを設計し,高齢者の運転特性に適応した操作制御・HMIの開発を目標とする.
↑ ページトップ
ドライバ運転行動の受容性検討
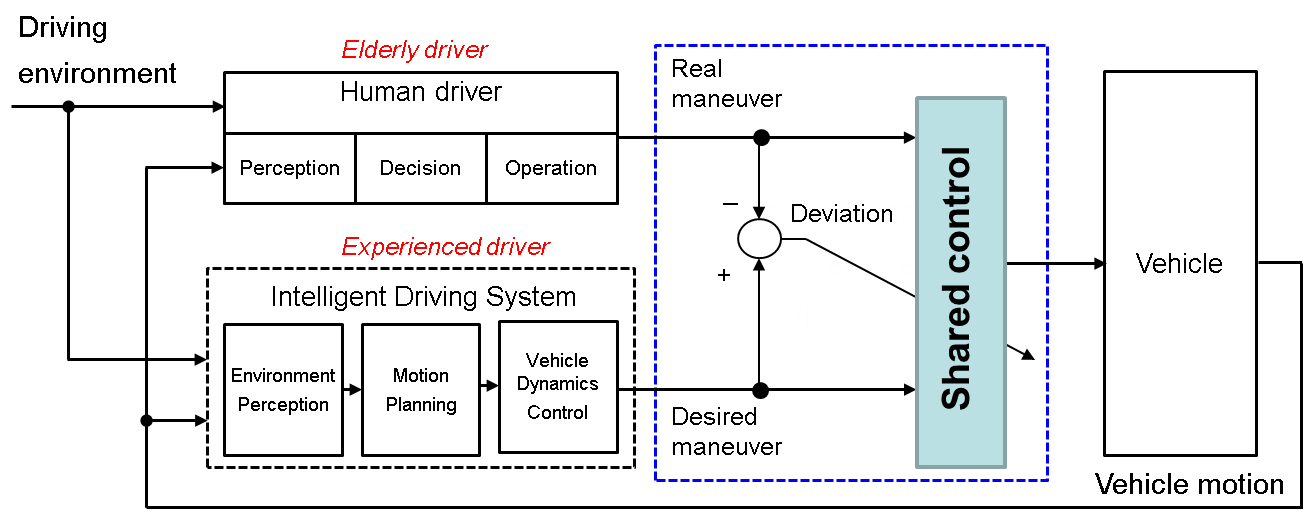
近年,衝突事故を防ぐため,自律的な操舵回避支援システムの研究が盛んに行われている. ドライバと支援システムが同時に同じタスクを協調して行う場合,いわゆるシェアード・ドライビング(Shared Driving)において,ドライバと支援システムとの干渉による閉ループ系全体の安全性能の低下,あるいはドライバの受容性が悪化する可能性も考えられる. そのため操舵回避支援技術の開発において,人間-自動車系の観点から,ドライバの操作行動に対して干渉が起きないように操舵回避支援の強さを適切に設定し,人間機械協調系を検討することが必要不可欠である. 一般的に操舵の制御手法としては操舵角制御方式および操舵トルク制御方式に分類される.操舵角制御方式はサーボ系を有し高い制御性能を実現することが可能であるが,ハンドルが動かなくなりドライバとの親和性が低い. 一方,操舵トルク制御方式では操舵角制御方式に比べ,ドライバとの親和性が高いが,操舵系の非線形特性やセルフアライニングトルクの影響を受けやすく,高い運動制御性能の確保が難しい. そこで本研究では,ステアバイワイヤを用い,ハンドル側の操舵トルク制御方式と前輪タイヤ側の操舵角制御方式を同時に実現することで,高い運動制御性能を確保しつつ,ドライバと支援システムの協調性向上を目指す.
↑ ページトップ
社会レベルでの受容性検討
確立した技術や事故再現モデル等によるシミュレーションをもとに,事故低減効果を予測し,費用対効果を明確にするとともに,導入シナリオを策定していく. 監督官庁等との協議により法規要件等を明確にしていくとともに,グローバル機関との連携から標準化を検討する. 市販化にむけて,情報のセキュリティへの対応や,社会的課題への対応を行っていくとともに,産官学連携のもと高齢ドライバへの訴求活動を進める.