知能化運転支援システムの全体構造
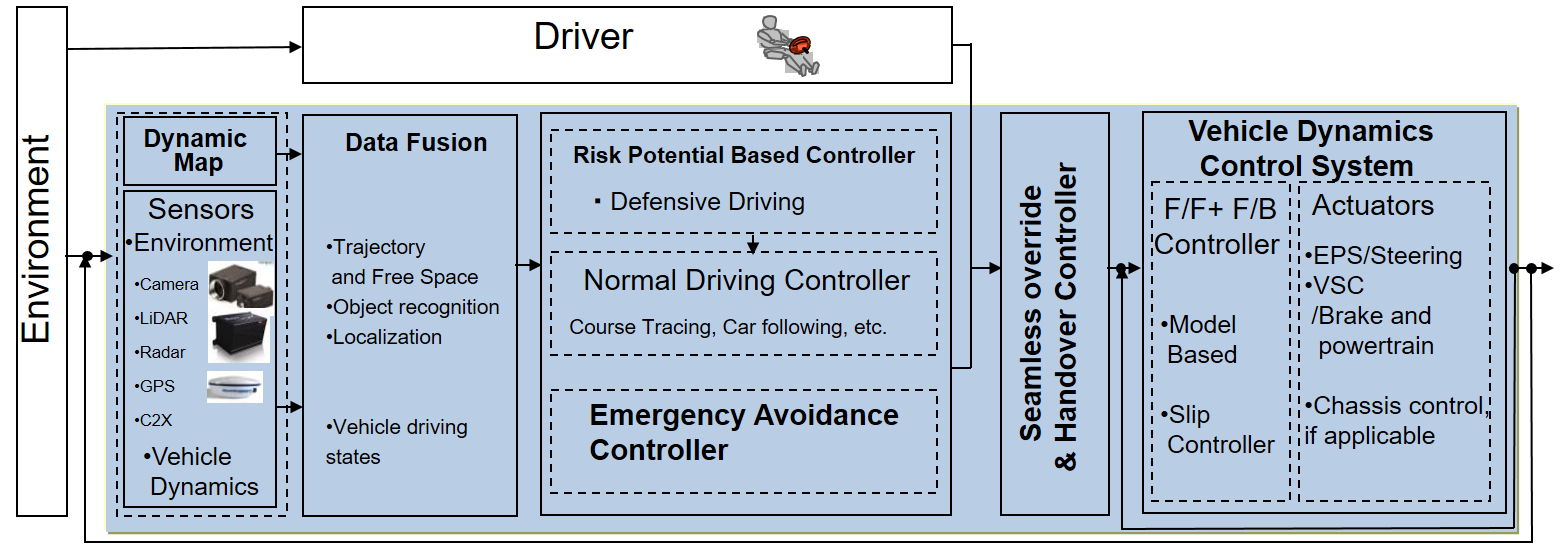
知能化運転支援システムの開発は,熟覧ドライバ特性に基づく自律運転知能を内蔵し,ドライバミスをカバーして事故低減を狙っている.通常運転から介入する運転知能を構築するための構成として,「センシング」,「知能化」,「運動制御」の大きな3つの構成とすることとし,ドライバ入力に対して機械側の制御量との調整を行える構成とすることで,ドライバ主権のシステム構成を実現した. 構築した知能化運転支援システムの特徴を以下に示す.
- (1) 基本走行,潜在リスク予測,緊急回避の3つのドライバモデル,制御構造を構築する.
- (2) 熟練ドライバのような潜在リスク予測により,支援量を適切に決定する.
- (3) 運動特性の違いを補償し適切な事故回避性能を実現する.
- (4) センサ・ハードウェアの種類に対応可能な制御構造である.
- (5) 既存の運動制御システムを使用可能である.
↑ ページトップ
本プロジェクトが目指すもの
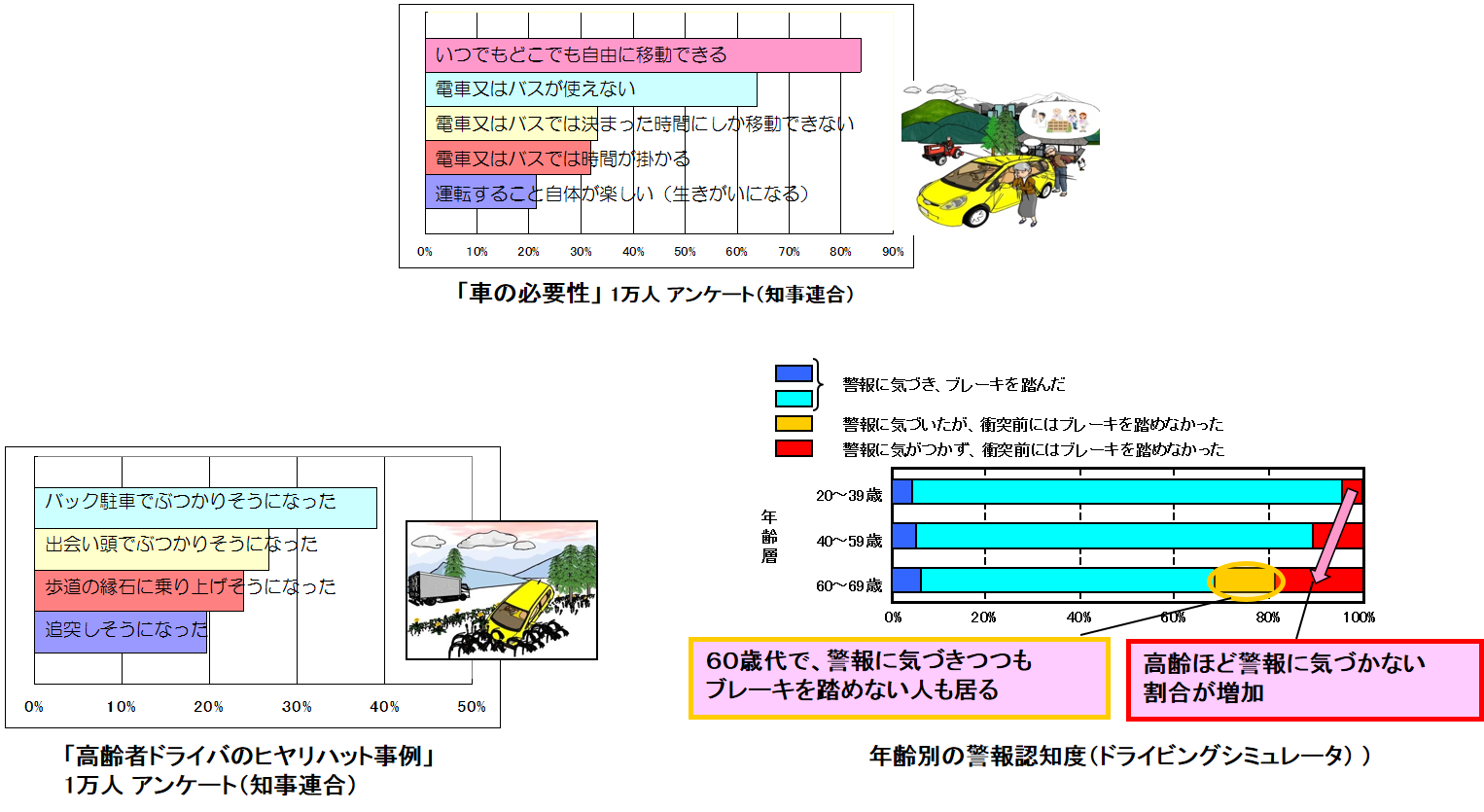
高齢者の日常生活を支える基盤として移動・モビリティは重要なファクタである.特に,地方地域のように歩ける範囲だけでは生活できず,また公共交通の貧弱なところでは,自動車運転が必須となる. しかしながら,加齢による身体能力の低下で,事故の危険リスクが高まる.実際,交通事故の第1当事者が高齢者である数は上昇傾向にあり,また高齢運転者数も今後20年で倍増することが確実視されている. このような背景をもとに,35都道府県知事で構成される「高齢者にやさしい自動車開発知事連合」が結成され,地方地域のモビリティ確保の重要な高齢者用自動車開発への動きがある. そこでは第2段階として,ITS等の運転支援機能の充実ということが目標として示されている.しかしながら,高齢運転者への情報支援は有効でなく逆効果になるケースがあるという実験結果もあり,警報等により正しい運転操作がなされると期待するのには無理があり, 最終的な危険回避には機械が制御介入するようなシステムが求められる.高度な運転支援システムは高価であり,高級車からの導入が一般的であるが,高齢者対応を考えると,機能を限定してでも安価に早期に普及させることが重要と考えられる. そこでロボット技術を適用した安全運転支援システムを考えるが,自動車運転は認知・判断・操作が必要で脳の活性度維持に有効な面もあるため,完全自動運転を目指すのではなく,運転者が主で機械が異常時のみバックアップするようなシステムをここでは対象とする. 従って,高齢者のいきいきとした生活をロボット技術を用いた自律運転知能が縁の下の力持ちとして支えるような達成イメージであり,研究開発テーマにきわめて合致する. 以上をまとめると,高齢者の日常生活を支える意味において,安全安心な移動の達成をゴールとして,その手段に,自律運転知能を有して必要なときのみに制御介入を行う安全運転支援システムを確立し,大量普及を目指す. そのためには,技術の信頼性向上等はもとより,運転者の受容性,地域交通の面での受容性(多様な属性の混合交通における安全性),社会としての受容性(法律や責任の問題、国の技術ガイドラインへ盛り込み)などを,社会実験等を通じて明らかにしていき, 高度技術が現実の社会に入っていくプロセスの一つのモデルを確立する. 本提案のシステムは最終的に10万円程度で買える車のオプション機能となるようなものを目指しており,年間数万台規模での普及を想定している.これの達成により,モビリティの点において,安全安心な豊かな高齢社会が実現できると考えている.
↑ ページトップ
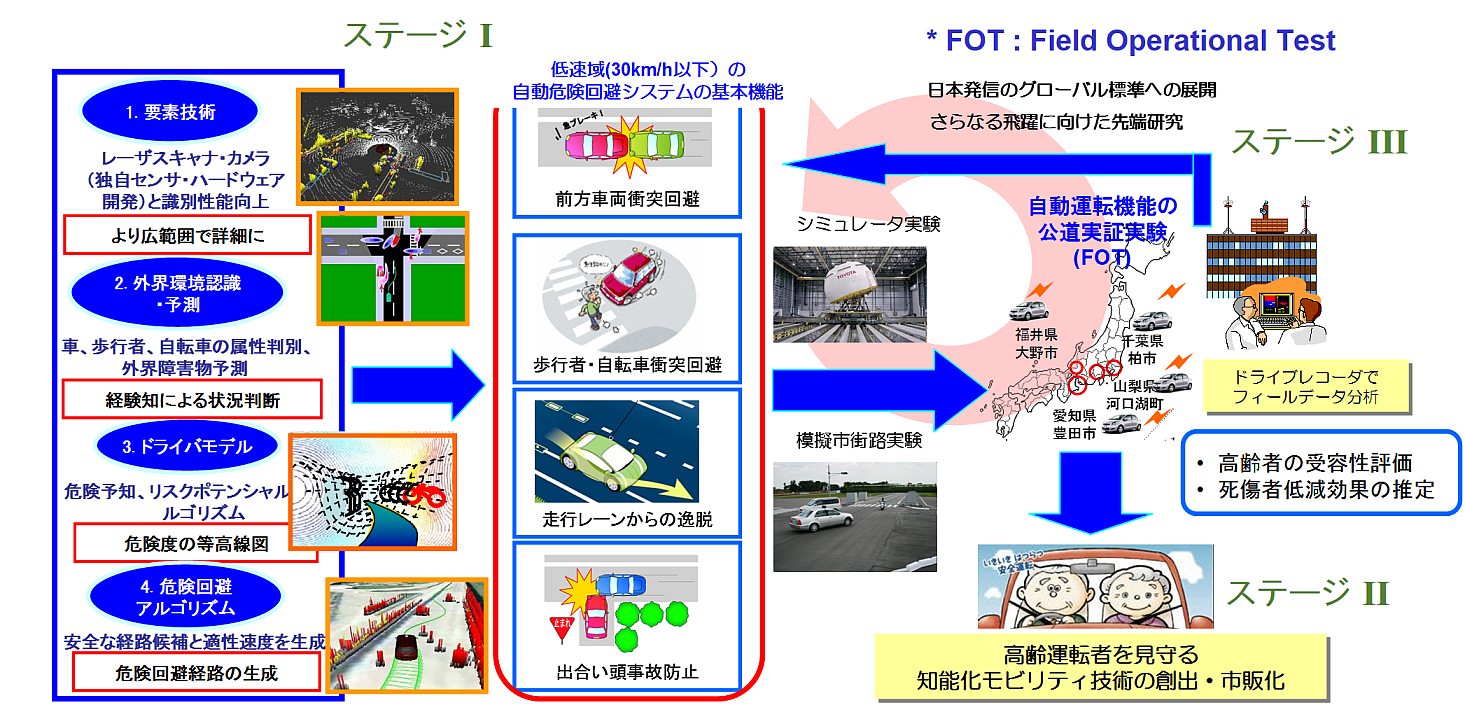
研究開発の全体計画
ステージI (2010-2012)
基本システム・要素技術の研究開発
ステージII (2013-2016)
プロトタイプ車の完成,社会実験での改良と市販化準備
ステージIII (2017-2021)
普及に向けた取り組み及び,日本発信のグローバル標準への展開
↑ ページトップ
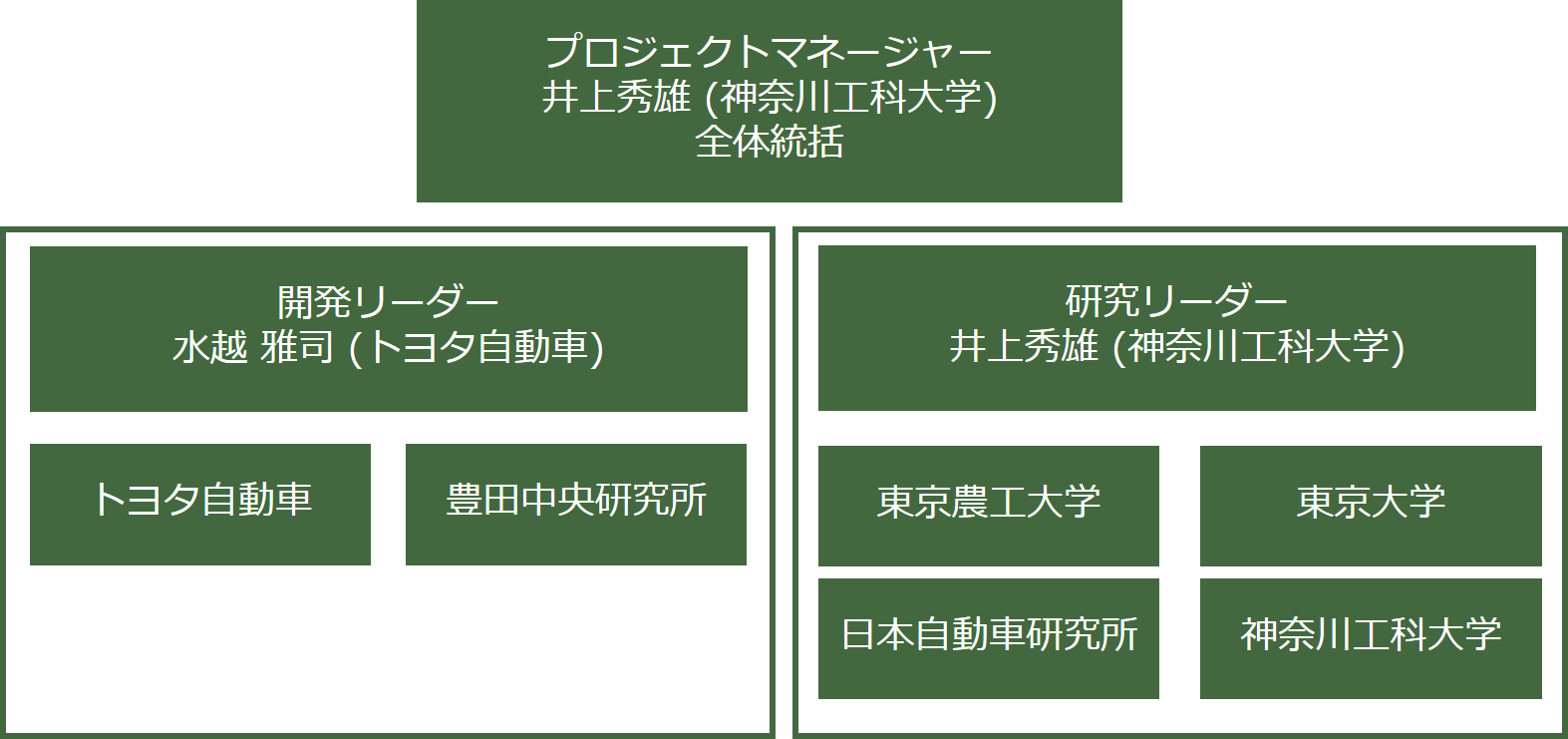
研究体制