Gas Source Localization Robot
ガス源探知ロボット
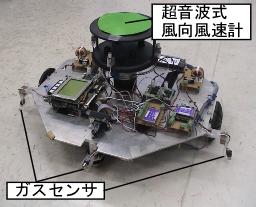
図1 超音波風速計を搭載したロボット
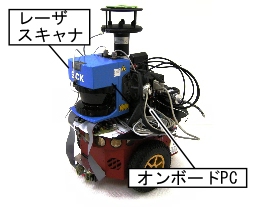
図2 レーザスキャナを搭載したロボット
石田研究室では、ガスセンサを搭載し、ガスを検知して、その発生源を自律的に探索できるガス源探知ロボットを開発しています。ロボットが自律的にガス源を探索することが出来れば、ガス漏れ箇所の探索や初期火災の早期検出などに応用することができます。
ガスは主に気流によって運ばれ、ガス源の風下方向にプルームと呼ばれる帯状のガス雲を形成します。そこで、ロボットに風向風速計を搭載して、ロボット周辺の気流を計測させ、ガスを検出したときには風上方向に移動させることで、ガス源の探知を行います。
図1のロボットは、気流の計測に超音波式の風向風速計を用いています。これにより、微かな気流も検出し、強い気流が存在していない環境でもガス源の探知に成功しています。また、ロボットがプルームから外れて、ガスを検出できなくなってしまったときには、風向に対して横切るように動作させ、プルームの中に復帰するというアルゴリズムも備えています。
図2のロボットには、ガスセンサや風向風速計に加えて、レーザースキャナやオンボードPCを搭載しています。これにより、正確な自己位置の推定や自律的な障害物回避が可能になりました。このロボットを利用して、様々な環境においてガスの濃度分布や気流場のマップを収集しています。収集した情報を利用することで、離れた場所からでもガス源の方向や位置を推定できるアルゴリズムの開発を目指しています。
 Top
Top