Crayfish Robot
ザリガニロボット

図1 ウチダザリガニ
(Pacifastacus leniusculus)
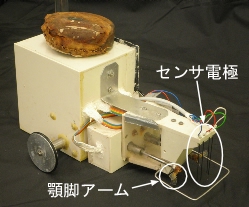
図2 ザリガニロボット
甲殻類の生物は、水中に漂う匂いを辿って餌を探し出します。例えばロブスターやワタリガニは、匂いを運ぶ流れを上流へ辿ると言われており、その行動が詳細に研究されています。一方、ザリガニは流れが乏しい淀んだ水中でも餌を探知できます。しかし、その行動メカニズムは完全には解明されていません。水中における化学物質の分子拡散速度は非常に低速であり、ザリガニが生息する沼や池の底のような流れが乏しい環境では発生源から放出された化学物質がほとんど周囲に拡がらないため、遠方から餌を探知するのは困難です。そこでザリガニは、顎脚(がっきゃく)と呼ばれる扇状の付属肢を振って能動的に流れを起こし、この流れで引き寄せた化学物質を小触角で検出しています(図1)。ザリガニが餌を探知する際には、この顎脚を用いた水流生成が必須であると考えられています。
本研究では、このザリガニの行動を模倣した水中ロボット(図2)を生物の物理モデルとして開発しています。ロボットは顎脚を模倣したアームを備えており、これを用いて水流を生成し、小触角に見立てた電気化学式センサの作用電極に化学物質を引き寄せて検出します。能動的な水流生成機構の効果を水中ロボットで実証することにより、ザリガニの嗅覚探索行動を解明する上で生物学的価値の高い知見が得られるものと期待されます。また、工場排水などに含まれる有害な化学物質の漏出源の探索にこの化学探知システムを応用できる可能性があります。
 Active Ste...
Active Ste...