Blimp Robot
飛行船ロボット
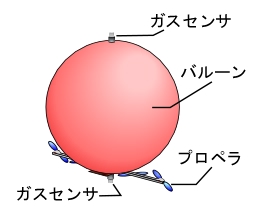
図1 飛行船ロボット
図2 飛行風景
室内空間において三次元的なガス濃度分布を計測することを目指し、飛行船ロボットの開発を行っています。工場やオフィスなどの天井付近でガス漏れが発生した場合、地上を走行するロボットでは上空を漂うガスの存在を検知できません。このような状況では、陸空中を自在に移動できる飛翔型ロボットが有効です。
図1に示す飛行船ロボットは、半導体ガスセンサをバルーンの上下に搭載しており、図2に示すように室内空間を飛び回ってガス濃度分布を計測します。室内全域のガス濃度分布を計測するためには、室内全域を飛行船ロボットがくまなく飛行するように誘導する必要があります。しかし、飛行船は慣性が大きく、しかも気流に流されやすいため、狙った位置に飛行船を正確に誘導することは困難です。そこで、あらかじめ用意した経路に沿って飛行船を誘導するのではなく、飛行船をランダムに飛行させ、室内各所のガス濃度を測定する方式を採ることにしました。
しかし、実際の室内で飛行船を飛ばしてみると、空調機が作る気流や自然対流に飛行船が流されてしまい、室内全域をカバーするガス濃度分布図を得ることができませんでした。そこで、飛行軌跡の偏り具合を随時確認し、まだガス濃度の測定を行っていない領域に飛行船を誘導する工夫を施しています。
 Crayfish R...
Crayfish R...