

Research Theme
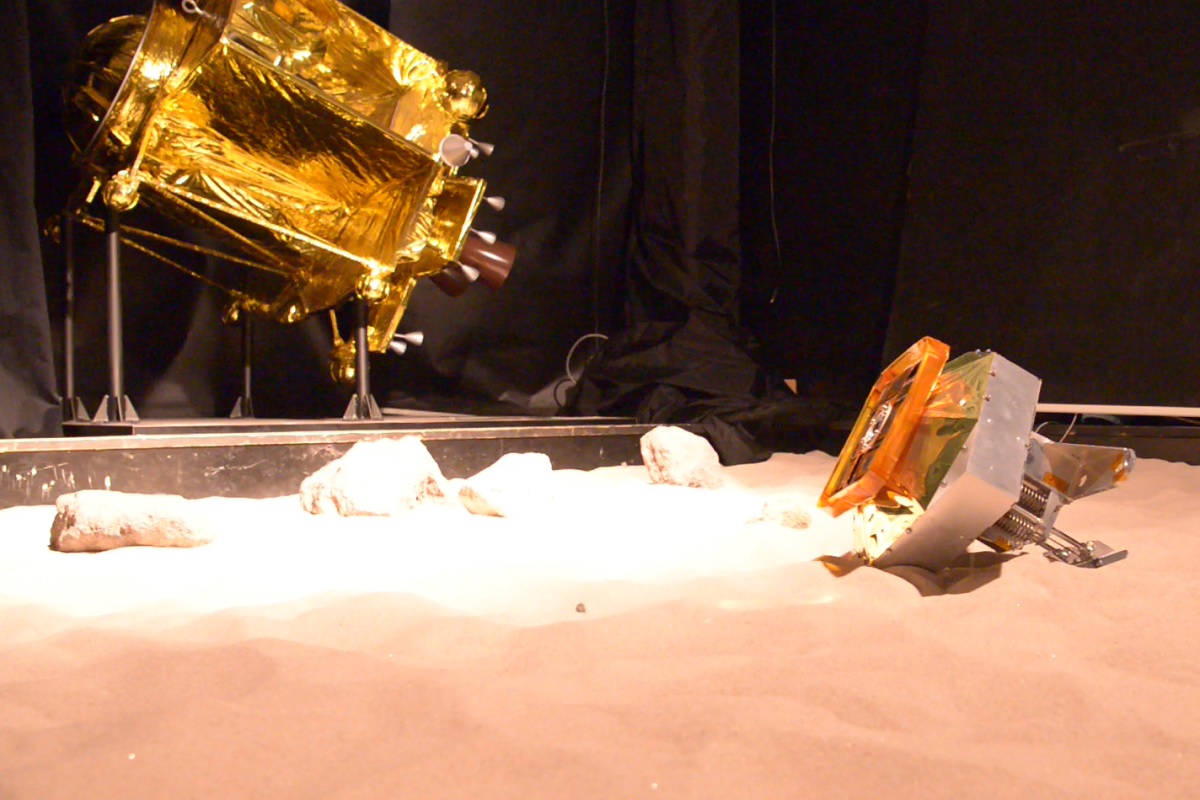
Our research interests are the moon, Mars, and Asteroids surface and sub-surface exploration technology. Using robot technology, we would like to access the extreme environment on the planetary body, where there is not yet been unveiled. For robotic exploration, robotics and mechatronics under the vacuum and microgravity environment become important. We are using a drop tower and the parabolic flight to test such an environment before launch. We also discuss the dual utilization of space robotics technology for commercial services such as agricultural, entertainment, security, and dual-use robots such as defense systems, etc.
研究テーマ
月着陸探査,火星着陸探査,ならびに小天体表面探査技術に関する研究を行っています. 主に,天体への着陸時における挙動解析や着陸脚システム・衝撃吸収系の設計・最適化,レゴリスとの接触問題, ならびに,天体表面の移動技術を扱っています. これらに関しては,学内だけでなく宇宙航空研究開発機構(JAXA)や他大学の研究者とも連携して, 来る次期月探査,火星衛星探査(MMX Mars Moon Exploration)をはじめとする, 天体表面着陸直接探査を実現するため,様々な側面から研究を進めています.
学部3年生へ
研究室配属のページを準備しました。 詳しくはこちらを参照してください。 体験配属について(大学内部からのアクセス専用)
{kind=link}
{kind=link}
{kind=link}
{kind=link}