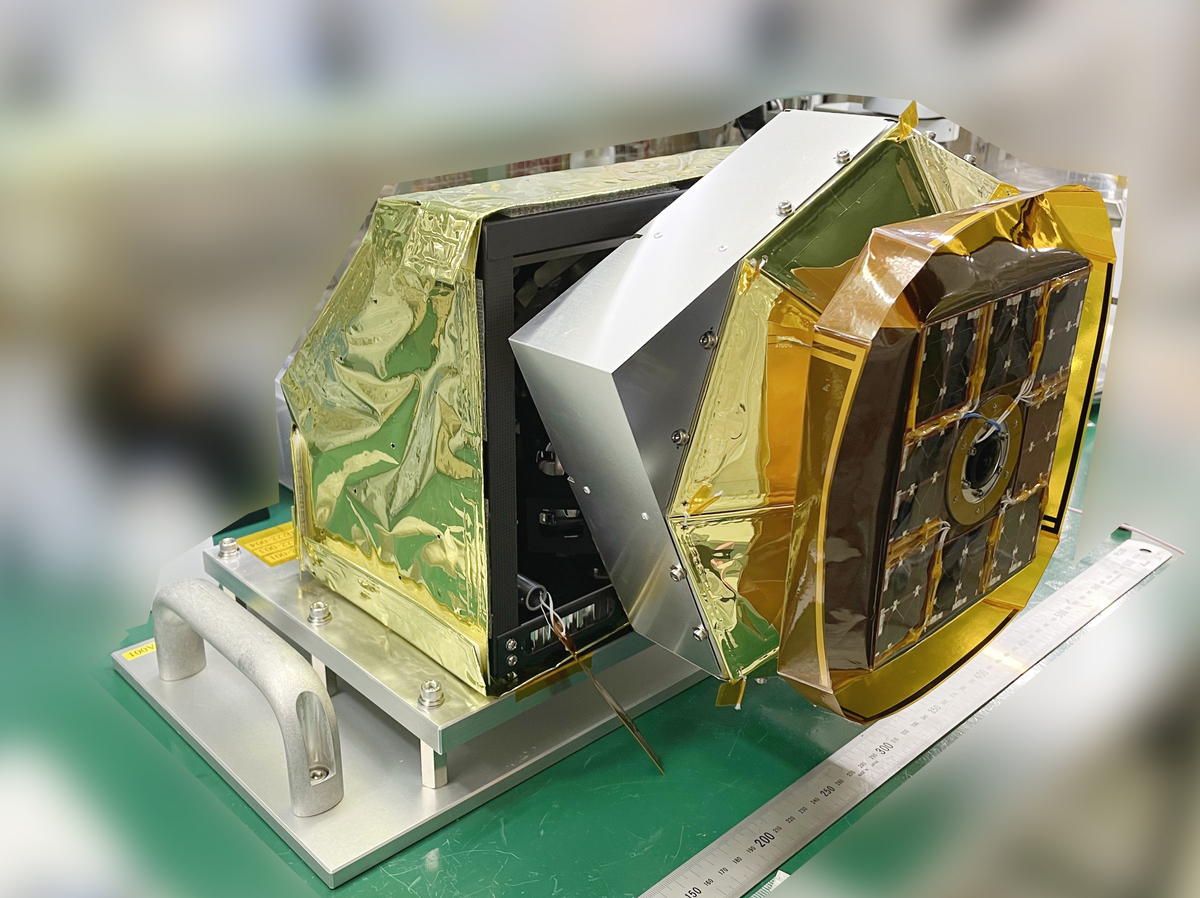
小型月探査ローバ LEV

LEVは2kg級の小型探査ローバで、小型月着陸実証機
SLIMのオプションペイロードとして開発されました。
SLIMプロジェクトの初期にISASや中央大國井研究室らで検討されていたホッピング型月面ローバを10年近くの歳月を経て実現したものです。
LEV(LEV-1)は跳躍機能を有し、月面の不整地を飛び越えて移動します。
また、動作は自律化されており、LEV自身の姿勢に基づき次の行動を判断し、
姿勢復元、観測データ取得、跳躍移動を自律的に実施するようにプログラミングされています。
LEV-1が取得したデータは、UHFおよびSバンドの通信により、母船であるSLIMを経由せずに直接地球へ送信されます。
また、同時にSLIMに搭載されるLEV-2のデータのリレーも行います。
LEV-2もカメラと移動機能を搭載し、着陸地点周辺の画像を取得する機能があります。
LEV-1は、LEV-2に対して通信機能を提供し、小型ロボットが月面で活動する大きなハードルの一つである通信機能を肩代わりします。
LEVに関しては、下記のリンクも参照してください。
LEVは2kg級の小型探査ローバで、小型月着陸実証機 SLIMのオプションペイロードとして開発されました。 SLIMプロジェクトの初期にISASや中央大國井研究室らで検討されていたホッピング型月面ローバを10年近くの歳月を経て実現したものです。 LEV(LEV-1)は跳躍機能を有し、月面の不整地を飛び越えて移動します。 また、動作は自律化されており、LEV自身の姿勢に基づき次の行動を判断し、 姿勢復元、観測データ取得、跳躍移動を自律的に実施するようにプログラミングされています。 LEV-1が取得したデータは、UHFおよびSバンドの通信により、母船であるSLIMを経由せずに直接地球へ送信されます。 また、同時にSLIMに搭載されるLEV-2のデータのリレーも行います。 LEV-2もカメラと移動機能を搭載し、着陸地点周辺の画像を取得する機能があります。 LEV-1は、LEV-2に対して通信機能を提供し、小型ロボットが月面で活動する大きなハードルの一つである通信機能を肩代わりします。 LEVに関しては、下記のリンクも参照してください。