№4. 人間行動のモデリングと予防安全研究
大学院工学研究院
先端機械システム部門 永井正夫 教授
研究の概要
一般的に機械の製品設計では、人間の操作の仕方を研究して安全で使い勝手の良いデザインがなされています。永井先生は、特に自動車、航空機、鉄道等のモビリティにおいて、ヒューマンエラーが悲惨な事故に直結することを防ぐために、ドライブレコーダを活用して人間の操作行動パターンを分析し、事故に関わるヒューマンファクターと予防安全に関する研究をしています。最近の自動車は電子制御化がかなり進んでおり、安全技術も昔に比べて格段に進歩しています。今回は、永井先生が取り組んでいる、機械側が人間の行動パターンを読み取り、運転を支援するような最先端の予防安全研究をご紹介します。
プロフィール

永井先生は、1977年に東京大学大学院工学系研究科産業機械工学専攻を修了された後、直ちに本学の専任講師として着任され、平成元年には教授になられました。着任以来今日まで33年間本学に在籍しています。
先生は、移動体(Mobility)の安全性や快適性の向上に関する制御工学的研究を行っており、具体的には、リニアモータカーや新幹線などの鉄道車両の動力学的研究や、エレベーターの振動制御、自動車の電子制御に係わる基礎から応用までの研究をいち早く手がけてきました。ドイツ連邦共和国ブラウンシュバイク工科大学車両工学研究所の客員研究員として産学連携研究を行ってきた実績もあります。最近では、日本学術会議「工学システムに関する安全・安心・リスク検討分科会」において、「交通事故ゼロの社会を目指して」という提言を発表されています。
永井正夫 先生のホームページはこちら
1.研究の「セールスポイント」を挙げるとしたら、どんなことですか?
人間が移動するための手段は、自転車、自動車、鉄道、航空機、船、エレベーターなど様々ありますが、こうした移動手段を総称して移動体(Mobility)と呼んでいます。私の学問領域は「動力学と制御」ですが、研究のセールスポイントを挙げるとすると、人間のダイナミクスをモデリングし、人間の特性に合わせた移動体設計法の研究を一貫して扱っている点だと思います。真に安全で快適な移動体を実現しようとすると、人間と移動体との関わりを徹底的に分析することが必要になります。この関わりには二通りあります。たとえば、自動車のように人間が機械を操作する関係と、乗客として、人間が一方的に機械に運ばれる関係があります。
前者の研究では、人間と機械との協調系のモデリングが重要で、機械の設計に大いに役立ててきました。しかしその協調関係が破綻した場合に、重大事故やヒヤリハットが生じます。その重大事故やヒヤリハットの発生する瞬間をいかに客観的に捉えて分析するかが、事故の再発防止策を検討する際に重要になります。そのために私たちの研究グループは、これまで100台以上の自動車にドライブレコーダを搭載してヒヤリハットの実データを収集・分析し、事故を未然に防ぐための「予防安全」の研究を体系的に行っており、この活動が多方面から注目されています。
一方、後者の研究では、振動環境における人間の振動感受性と振動制御に関する研究を長年行ってきました。最近行った共同研究の代表例としては、超高層ビルTAIPEI101に設置された高速エレベーターの振動制御装置の開発が挙げられます。東芝エレベータ株式会社が設置したこの高速エレベーターは1,010メートル/分の上昇速度を誇る世界最高速エレベーターとしてギネス・ワールド・レコーズ社のギネスブックにも掲載されていますが、このような高速度で走行する場合、振動を人間が感じないレベルまで抑えるには高度な技術と様々な工夫が必要なのです。本共同研究において、これらの振動制御技術の開発を進めることにより、ハイスピードかつ快適な走行を可能にするエレベーターが実現しました。
2.現在の日本を取り巻く交通情勢はどのような状況なのでしょうか?
図1に示すように、平成21年の自動車交通事故死者数は4,914人で、昭和27年以来57年ぶりに4,000人台と少なくなっています。しかしながら、いまだ70万件以上の交通事故が発生し、負傷者数は90万人を超えているなど、依然として憂慮すべき交通情勢にあります。事故による渋滞などまで考慮すると、影響を受ける人の数は膨大になり、経済的損失額は年間数兆円にもおよぶという試算もあります。
このような背景から、第20期の日本学術会議の「工学システムに関する安全・安心・リスク検討分科会」では、究極的に事故ゼロに向かって取り組むべき論点等を提言「交通事故ゼロの社会を目指して」としてまとめ、2008年6月に公表しました。この提言では、具体的な取り組みとして(1) ドライブレコーダの活用、(2) ヒューマンファクター研究の推進、(3) 予防安全技術の研究開発、(4)安全教育の徹底化を挙げています。
交通事故の無い社会を目指していくためには「事故はやむを得ない」とか「事故に遭ったら運が悪い」といったこれまでの考えを改め、あらゆる努力をしようという国民的なコンセンサスが最も重要なのです。
図1 平成21年までの交通事故の発生状況(警察庁交通局)
3. 移動体においてヒューマンエラーを防ぐことはとても重要ですが、先生はどのようにして、ヒヤリハット分析を進めたのでしょうか?
2003年に「ヒヤリハット分析委員会」を立ち上げて以来、長い年月をかけて構築してきたヒヤリハットデータベースがヒヤリハット分析の対象事例として活用されています。ヒヤリハットデータベースとは、タクシーにドライブレコーダーを搭載し、急ハンドルや急ブレーキをトリガーとしてドライブレコーダーを作動させる仕組みを使って、交通事故や未遂の事例を収集したデータベースのことで、社団法人自動車技術会や他大学とも連携し、東京都や静岡県のタクシー会社の協力を得て行ってきました。現在は約4万件の登録数となっており、世界でも他に例を見ないものとなっています。
図2は、実際の全国の事故データ83万件とヒヤリハット8千件をそれぞれ事故類型別に分類し、比較したものです。どちらも人対車両では「横断歩道横断中」、車両相互では「追突」が大きな比率を占めるなど、類似した傾向にあるため、ヒヤリハットデータベースの分析を進めることで、地域要因を除いた事故のかなりの部分をカバーできると考えています。このようにヒヤリハット分析は、後述するような予防安全装置の設計にフィードバックすることが可能です。
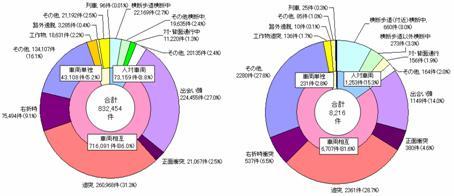
図2 事故統計とヒヤリハットの関係
4. 予防安全技術の必要性と技術開発の事例を教えて下さい。
ロボットと違って自動車は移動速度が大きいため衝突時のダメージは桁外れに大きくなります。数値で表してみると、衝突時の運動エネルギーは速度の二乗に比例するため、時速6キロメートルで移動ロボットが壁にぶつかる時と、時速60キロメートルで自動車がぶつかる時とでは、速度の二乗比で100倍、質量比10倍とすると合計1000倍の運動エネルギーの差となります。
従来の安全技術は主として、「衝突時のダメージを軽減する」技術であり「衝突安全(Passive Safety)」と呼ばれ、エアバッグ、シートベルト、衝撃吸収ボディなどがそれにあたります。一方、近年は安全技術のパラダイムシフトが求められるようになり、「予防安全(Active Safety)」と呼ばれる「事故を未然に防ぐ」ための安全技術が注目されています。近年、PCS(Pre-Crash Safety)という一種の自動ブレーキ装置が開発されていますが、これは衝突が避けられないと判断した時の衝突速度を低下させて、被害を軽減させる予防安全技術です。追突による犠牲者を大幅に削減することが期待されます。
また、人間が自動車を運転するフィードバック制御系(Man-In-The-Loop)の研究も進んでいます(図3)。この制御系は、人間のミスを補う運転支援システムにより安全性を向上させるもので、運転者が危険な運転に陥る状況になったときに、警報を出して運転者の注意を喚起したり、強制的に操作の支援をして危険を回避することができます。
図3 人間・自動車系と運転支援との関係
5.人間のミスにも性格や状況によって様々なものがあると思いますが、個別に対応する支援サービスは可能なのでしょうか?
私たちの研究グループは東京大学の研究チームと協力して、独立行政法人科学技術振興機構(JST)の戦略的創造研究推進事業(CREST)「安心・安全のための移動体センシング技術」の研究をしています。この研究では、自動車・家電などの機械の稼動や利用者の行動などの振る舞い情報を計測・蓄積し、その特徴やくせを抽出する統合センシング技術や、その情報に基づいて個別適合したサービスを可能とする技術の確立を目指すもので、これにより、個人の性格や状況に対応した、きめ細かな安全・安心サービスを実現することができます。その研究の概要についてご紹介しましょう。
まず、私たちの研究グループは先行車や道路区間等に対するドライバのアクセル・ブレーキ操作を5つの運動行動ラベル(先行車追従行動(ラベルF = Following)、先行車に追突しないための減速行動(B = Braking)、単独走行行動(C = Cruising)、赤信号、一時停止などの強制的な減速行動(D = Deceleration)、停止行動(S = Stopping)に分類し、実際の走行データを蓄積しました。
このデータを基に確率的機械学習の手法を用いることにより、前後方向における運転行動の自動推定法を確立したのです。確率的機械学習とは、様々な状況に応じて各々の運転行動ラベルが推移する状態を確率的に示す手法のことです。例えば、私たちは普段、自動車の前後運動を制御するためにアクセルペダルやブレーキペダルを操作しながら運転行動をとっていますが、この状態を確率的状態が常に推移することを示す統合型ドライバモデルとして表すことができます(図4)。

図4 運転行動遷移モデルによる統合型ドライバモデル
図5はこの研究を実施する際に用いた、常時記録型ドライブレコーダの計測画面です。本システムは、車体速度、前後加速度、アクセルペダル変位量、ブレーキ踏力、先行車との車間距離、GPSによる道路位置を計測し、6台のCCDカメラにより道路風景、足の位置、ドライバの上半身の映像を時系列データと同時に記録しています。
この自動推定法により、個々に異なるドライバの運転特性や走行環境によらず、高精度な運転行動の推定が期待できるようになりました。
図5 常時記録型ドライブレコーダ計測画面
最終的にはこのような大量の運転行動データベースを分析して、個別適合システムのコア技術確立を目指しています。このシステムは、①いつもの運転行動のデータベースを蓄積し、②現在の走行データから運転行動予測をして、③いつもの運転と比較して、④異常であると判断された場合に、⑤危険情報や警告を出すものです。(図6)個人の運転行動データベースに基づいたきめ細かな運転支援サービスを実現できます。
図6 個別適合サービスのコア技術
このような運転支援サービスの開発に際して、効果評価をどのように進めるかがきわめて重要であり、特に危険な場面での効果評価のためには、図7に示すような運転シミュレータが有効です。本学では、6軸電動モーション付き運転シミュレータにより効果評価しています。

図7 運転シミュレータ(東京農工大学)
6.研究を進めていく上で必要と思われること、学生や若い研究者に伝えたいことはありますか?
研究を進めていく上で必要なことは、一言でなかなか言い尽くせませんが、高い目的意識を持つとともに、当面の目標はできるだけ明確なものを設定すべきです。目標に向かって必ずしも順調に行かない場合も多く、その場合は、なぜ?どうして?と自問自答することになりますが、迷ったらできるだけ原点に戻って考え直すことを進めます。また先生や先輩・同僚とは積極的に接触して議論することです。所属する学会で研究成果を発表する機会もあるかと思いますが、学外の研究者仲間と情報交換することも大切です。
若い研究者には、自分の研究領域に情熱を持って取り組んで欲しいと思います。ある程度年数を重ねるとライフワークというものを意識します。最近、ぶつからない車、カー・ロボティクスといった新しいコンセプトを提唱していますが、興味のある方はぜひ一緒にやって行きましょう。

平成22年10月掲載 インタビュワー◆サイくん