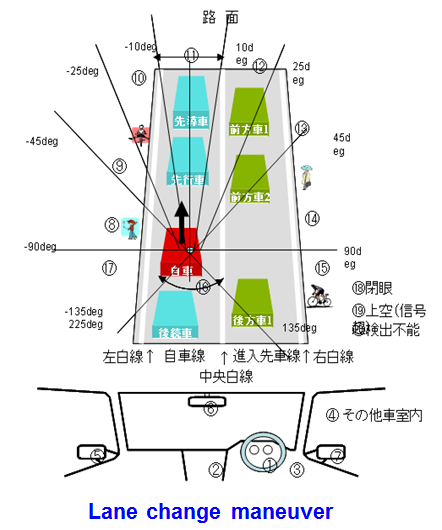
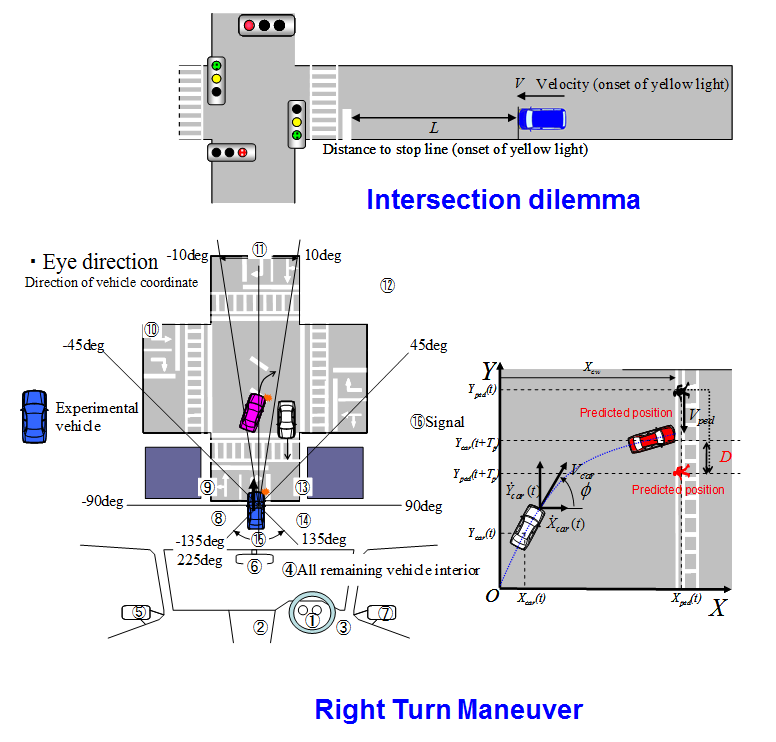
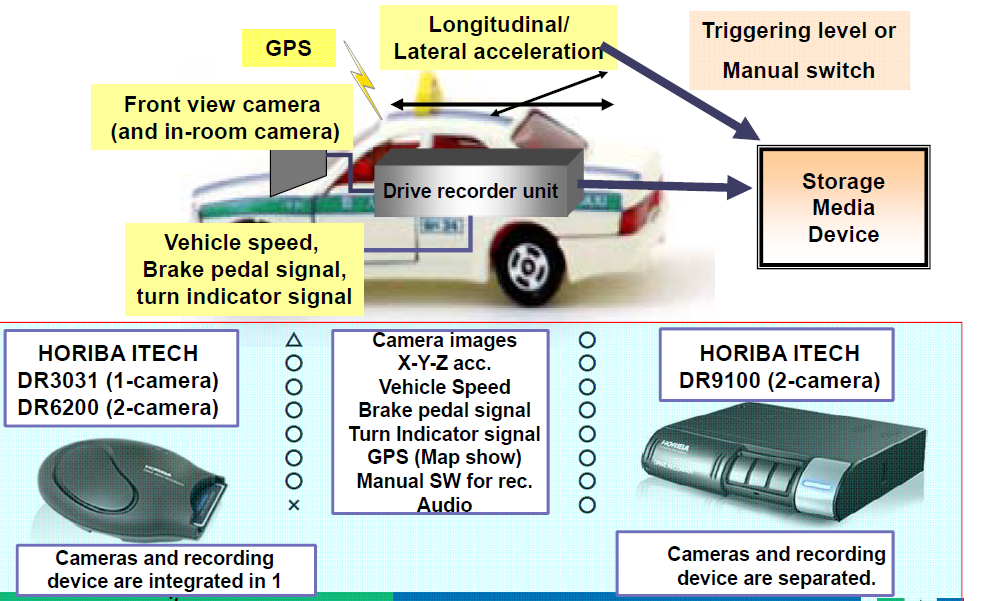
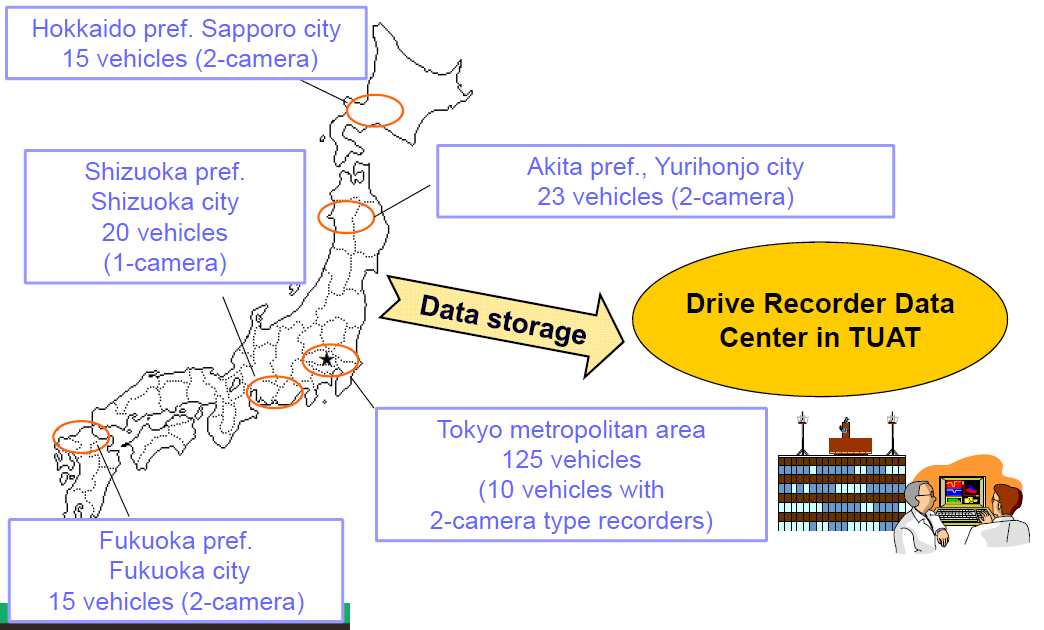
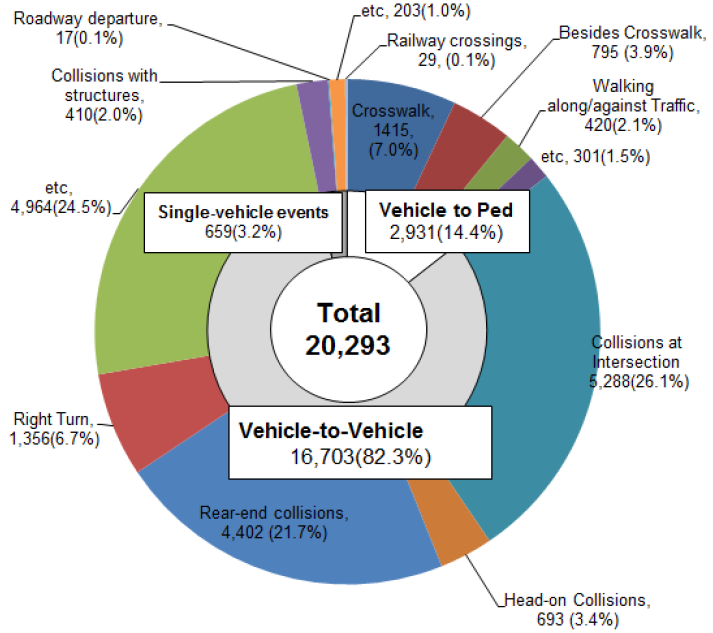
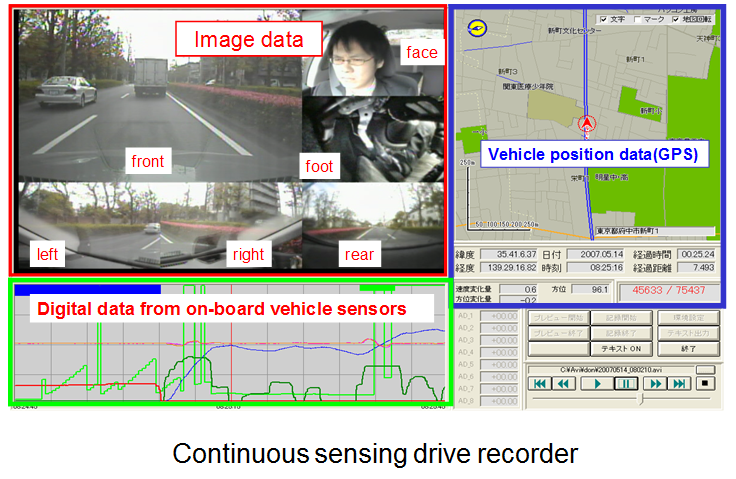
This study conducted an analysis of the near-miss incident database constructed in the Smart Mobility Research Center of Tokyo University of Agriculture and Technology to obtain the list of the critical driving scenario which contains the key parameter conditions of the surrounding environment as well as the driver collision behavior characteristics. Currently, the database center is managed by Tokyo University of Agriculture and Technology, and 89,000 crash-relevant-event data were registered as of March 2014. Each data contains the 15-second snapshot front-view video images, the vehicle dynamics, the vehicle location and the driver operation data which are recorded by the drive-recorders mounted on 200-taxis in Japan. Some of drive-recorders also include the driver face image for the analysis of driving behavior in detail. By using the drive recorders, information such as the velocity, the acceleration, the braking operation of drivers can be acquired.
"Autonomous Driving Intelligence System to Enhance Safe and Secured Traffic Society for Elderly Drivers"
Granted by Japan Science and Technology Agency (JST)
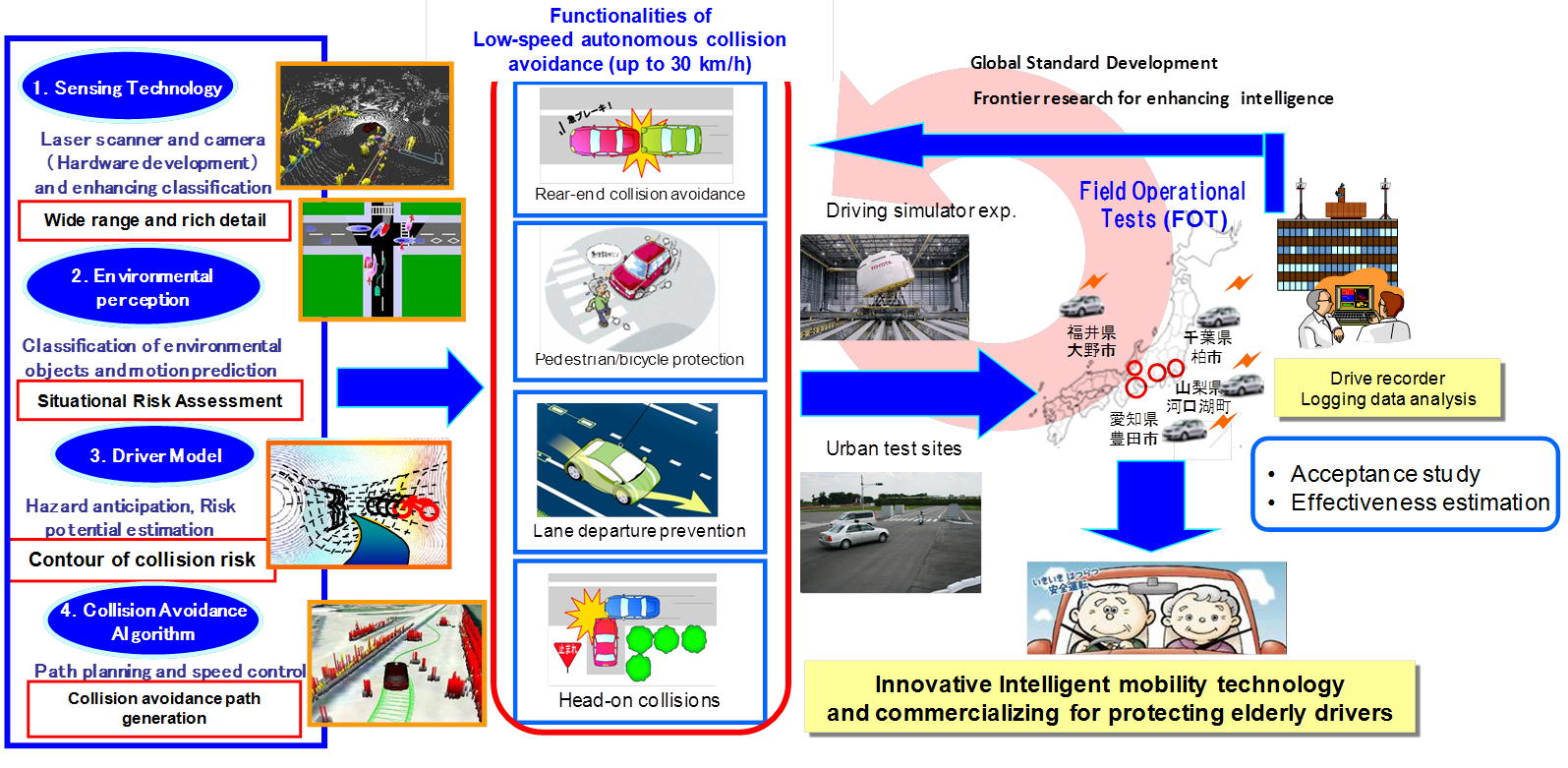
“Autonomous Driving Intelligence System to Enhance Safe and Secured Traffic Society for Elderly Drivers” project which was adopted and started in 2010 as one of the technology innovation projects to vitalize “aged society”. This project has been carried out based on the university and industry collaborative framework which is comprised of Tokyo University of Agriculture and Technology (TUAT), and the University of Tokyo, Toyota Central R&D Laboratory, and Toyota Motor Corporation. The main purpose of this project is to realize an autonomous driving intelligence system embedding an experienced driver model to recover degraded performances of recognition, decision-making and operation for elderly drivers. The vehicle control concept proposed in this project will be penetrated into the market as advanced driver assistance systems, and the concept is applicable to autonomous driving system design for certain traffic circumstances in the near future.
This project aims at the significant improvement of road safety by intervention of autonomous driving control for preventing accidents in the last second caused by elderly drivers. High driver acceptance and social acceptance are also ones of system requirements.
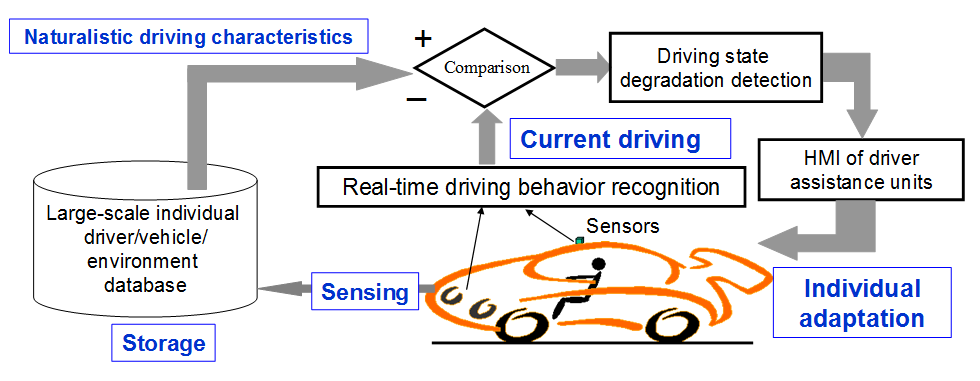
This research project aims to construct an advanced driver assistance system for enhancing the safety of mobility and fun to drive by adapting the vehicle control functions to driving characteristics and driving ability of each individual driver. TUAT is joining the project in the part of “Vehicle Control” which is a function of motion planning and control system according to the driving situational risk assessment. Utilization of the stored large-scale database of each individual driver in certain driving circumstances as well as a dynamic map of driving environment is a key point of the advanced development of the intelligent mobility. By deploying such mobility in aged society, it is expected that we can realize the safe and secured society together with improve the quality of life of the elderly people.
This study aims to design vehicle dynamics control systems and driver assistance systems as well as autonomous driving systems with the application of control theory by using the structural merits of in-wheel-motor electric vehicles. The sensor-controller-actuator platform which can be used to control the vehicle motion by steering, traction and braking are developed in the laboratory. Car-Robotics technology which combines the knowledge of the vehicle engineering and the robotics engineering is studied to design new vehicle control systems/mechanism and obtain optimal human-machine-interface in cooperative driving.
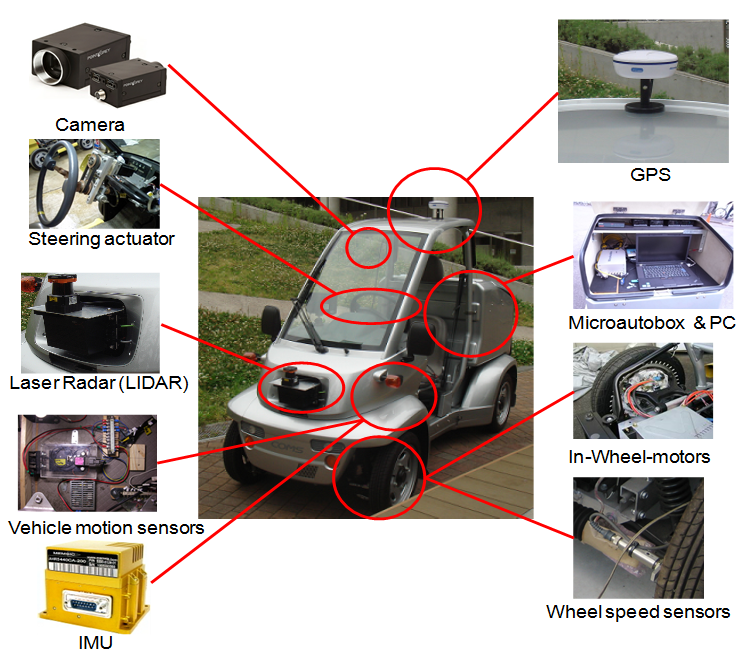
Autonomous Driving and Intelligent Vehicle Motion Control by Using Micro Electric Vehicles


The driving simulator with hexapod type motion cueing is used to study the human driver characteristics and human factor issues in various driving situations, verify the effectiveness of the driver assistance systems. Recently, accident reconstruction based on near-miss incident database and studies on shared driving characteristics in steering operation and braking operation in collision avoidance situations are being conducted.



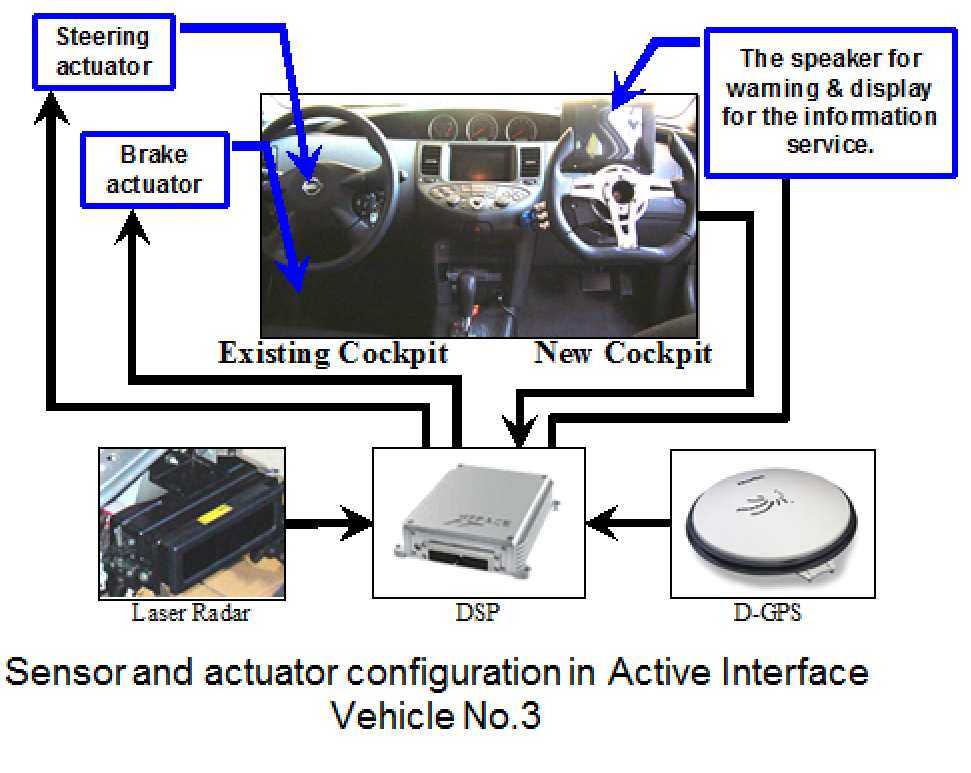
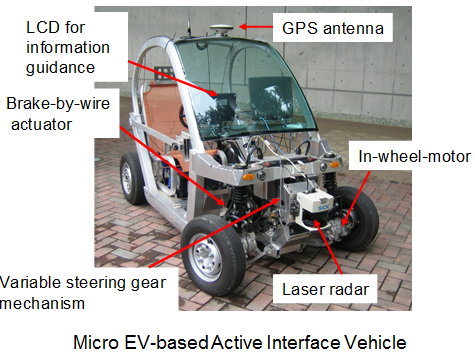
This research focuses on driver assistance technology proposed by our research laboratory group called “Active Interface Vehicle (abbreviated as AIV)” which can realize cooperative characteristics between vehicle and human driver. AIV is based on the structure of passenger car for prototyping, and the micro-electric vehicle especially for the aged drivers and equipped with SBW and intelligent braking assistance system. AIV is implemented to be adaptable to individual driver's driving characteristics for driver assistance system in normal and emergency driving situation. The vehicle is equipped with LCD monitor for information guidance and warning-sound system for forward collision avoidance. The braking and steering assistance system takes over the driving operation when the driver does not intend to brake although the vehicle is going to collide with forward obstacle or vehicle. Besides micro electric vehicle, the evaluation of driver assistance systems using driving simulator with motion cueing system is being conducted.


This research is a part of the Key Technology Research Promotion Program “Development of Advanced Driver Assistance Systems Adapted to Elderly Drivers” funded by the New Energy and Industrial Technology Development Organization (NEDO) of Japanese government.
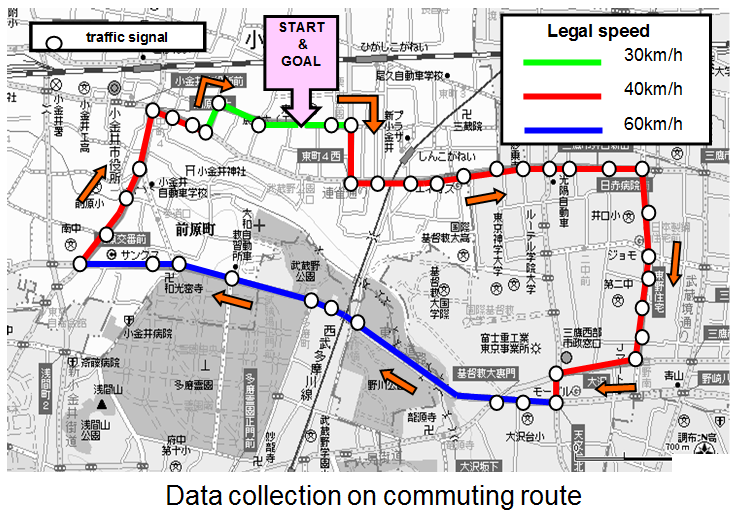
Focusing on driver assistance system in real-world situations, it is necessary to design the human-machine interface for driver assistance systems to obtain the satisfactory interaction in cooperative maneuver between safety system and human driver manual control. The design of cooperative control among these devices, which fits the driver behavior or intention, is required. Especially, in this research, the predetermined routine driving route as one’s commuting path is focused here to examine the driving behavior of the individuals. The required main functions of the system are
Recently, data collection along the predetermined route is conducted and driver behavior during each driving maneuver is modeled and analyzed to get the ordinary driving behavior of each individual.
This research is a part of the Core Research for Evolutional Science and Technology (CREST) research programs entitled “Mobility Sensing for Safety and Security”, funded by Japan Science and Technology Agency (JST).
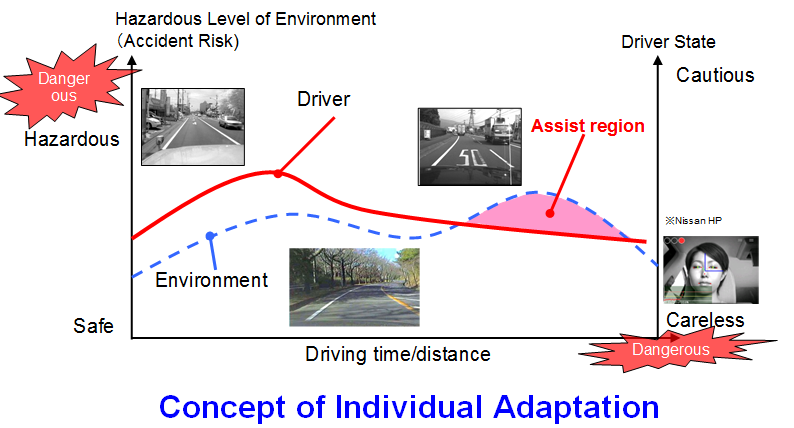

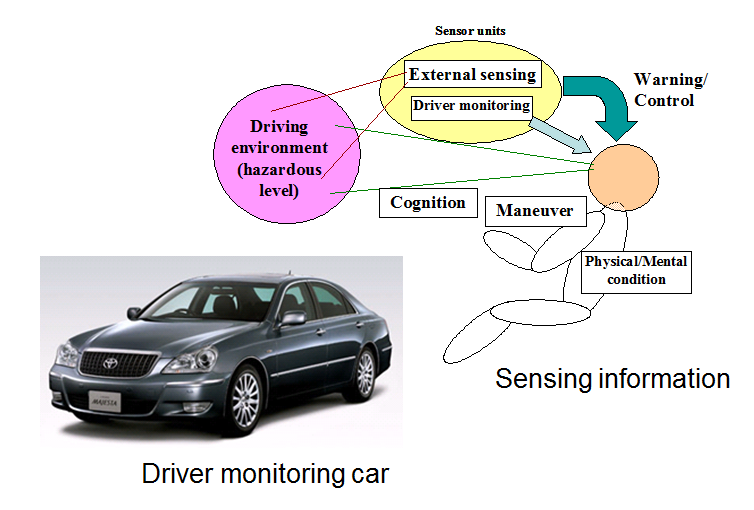
Recent advances in practical adaptive driver assistance systems and sensing technology have led to a detailed study of individual driver behavior. The required functionality of the driver assistance systems is to remove human error from the closed-loop driver-vehicle system in order to secure driving safety. The driver assistance systems can be categorized into two main approaches: one is accident-prevention systems which activates in the case that there is a high risk potential of accident such as Pre-Crash Safety (PCS) system, and the other is driver advisory/warning systems which prevents drivers from accident occurrences in the early stage by inducing drivers with visual, auditory or haptic devices. To realize the latter system, the design of human-machine interface which fits the driver behavior/intention and ongoing traffic situation is required, and the extensive study of individual driver behavior model is necessary. This research aims to construct a safe driving assessment system from the viewpoints of maneuvers, cognitive behavior, traffic rule obedience and considerateness to surroundings.