This study aims to improve the fuel economy of light duty hybrid truck in the case of bad-mileague driver.
Longitudinal vehicle dynamics of light duty hybrid truck and driver following the preceding vehicle are modeled by
using experimental data of the actual target vehicle and driving simulator. Then, the problem that concerns the
increase of fuel consumption is clarified by theoretical analysis using computer simulation which include both two
above-mentioned models, the vehicle and the driver, as driver-vehicle system. Finally the control method of hybrid
system is proposed by considering driver pedal operation characteristics to improve fuel economy in vehicle following
situation.
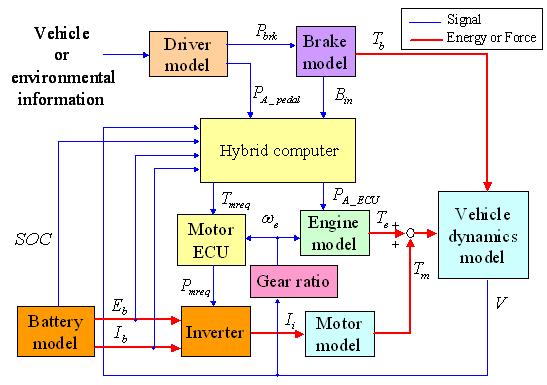
Fig.1 Configuration of Hybrid Electric Vehicle Driving/Braking System
 自動車の運動性能向上技術 (Vehicle Dynamics and Control)
自動車の運動性能向上技術 (Vehicle Dynamics and Control) 加速性能と燃費性能を両立したハイブリッド電気自動車のトルク配分制御の研究
加速性能と燃費性能を両立したハイブリッド電気自動車のトルク配分制御の研究 戻る
戻る