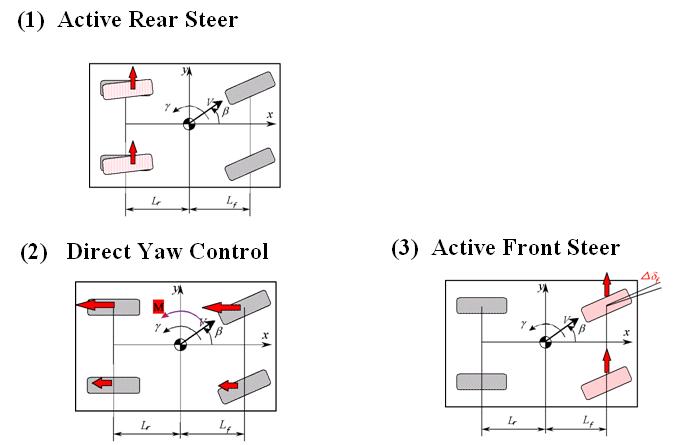
This study proposes a control system to improve vehicle handling and stability under severe driving
situations using the active control of front and rear steering angles combined with the yaw moment generated
from the distribution of driving/braking forces of four tires (DYC). With the application of model matching
control technique, the controller consists of a feedforward compensator with respect to the steering wheel
angle, and a feedback compensator depending on state deviation. We are investigating on the difference of control
effect among various combination of these chassis control technologies against external disturbances or arbitrary
steering input on critical road situations.
 丂帺摦幵偺塣摦惈擻岦忋媄弍 (Vehicle Dynamics and Control)
丂帺摦幵偺塣摦惈擻岦忋媄弍 (Vehicle Dynamics and Control) 丂憖懬埨掕惈岦忋偺偨傔偺憖懬丒惂嬱摦攝暘惂屼偺尋媶
丂憖懬埨掕惈岦忋偺偨傔偺憖懬丒惂嬱摦攝暘惂屼偺尋媶 栠傞
栠傞