【NOVEL-I : ドライブバイワイヤシステム】
■車輪の空転(滑り)防止 : Traction control
■左右輪の駆動力配分による車両安定化制御システム:Stability control
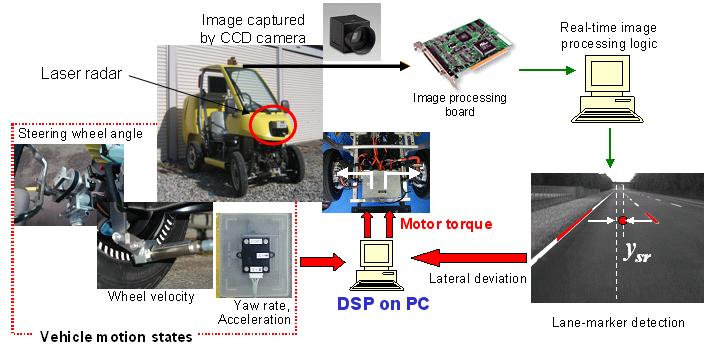
■左右輪の駆動力配分による車線維持制御システム:Lane keeping control
■先行車追従制御システム : Adaptive cruise control
This research focuses on vehicle dynamics control applications on micro-scale electric vehicle
for enhancing its active safety. The use of in-wheel-motor control in various control objectives as
active safety devices are studied. The control systems for enhancing vehicle dynamics such as direct
yaw moment control for side slip prevention and active front steering for handling by using steer-by-wire
mechanism are studied. Moreover, external sensing systems are integrated to synthesize driver assistance
systems, e.g. lane keeping assist system, and adaptive cruise control system.
NOVEL stands for "Nagai Onward Vehicle Laboratory". The experimental vehicle has been developed
since 2001.
Fig.1 Electric Vehicle "NOVEL" with sensor-actuator configuration
 自動車の運動性能向上技術 (Vehicle Dynamics and Control)
自動車の運動性能向上技術 (Vehicle Dynamics and Control) 超小型電気自動車によるメカトロニクス車両の運動制御に関する研究
超小型電気自動車によるメカトロニクス車両の運動制御に関する研究 戻る
戻る