予防安全装置の開発 (Active Safety Devices Development)
予防安全装置の開発 (Active Safety Devices Development)
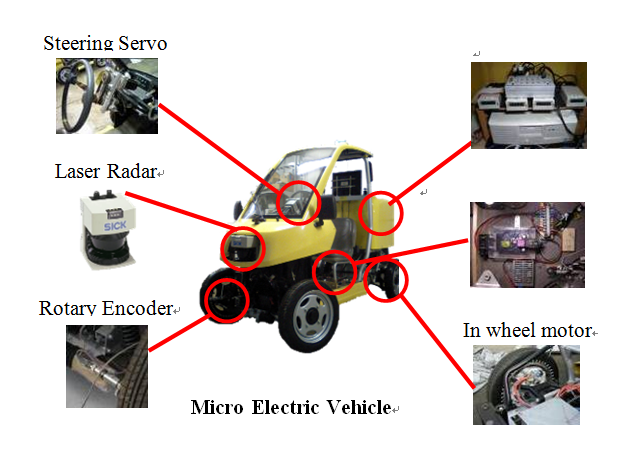
 超小型電気自動車を用いた障害物自動回避の運動制御システムの開発
超小型電気自動車を用いた障害物自動回避の運動制御システムの開発
Development of Vehicle Dynamics Control System for Automatic Obstacle Avoidance by Using Micro Electric Vehicle
事故時におけるドライバの約4割は回避行動を取っておらず,その原因の多くは認知遅れや判断ミスであるとされているため,状況に応じた回避行動を支援するシステムや自動で回避行動を行うシステムの開発が必要であると考えられます.
本研究室では,レーザレーダを用いて周囲状況を判断し状況に応じた回避方法と回避軌道を理論的に導出し,その回避軌道に追従するよう車両を制御して自動で回避する障害物自動回避システムについて数値シミュレーションと実験により研究しています.
RESEARCH ABSTRACT
This research proposes an autonomous obstacle avoidance system as one of the active safety technologies.
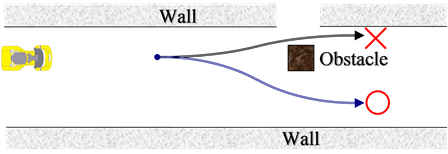
We focus on a scenario where a frontal obstacle suddenly appears during driving in a path with the walls on both sides of the vehicle.
The system derives an appropriate avoidance trajectory geometrically from the surroundings information obtained by a laser range finder.
Then, the vehicle is controlled to avoid the obstacle automatically by the cooperative control of braking and steering system.
Its possibility in real time is confirmed by numerical simulation and experiments using an electric vehicle.
 戻る
戻る