予防安全装置の開発 (Active Safety Devices Development)
予防安全装置の開発 (Active Safety Devices Development)
 操舵トルク入力による自律型操舵回避支援システムの開発と協調性評価
操舵トルク入力による自律型操舵回避支援システムの開発と協調性評価
Development and Evaluation of Autonomous Lateral Collision Avoidance Assistance System by Steering Torque Input
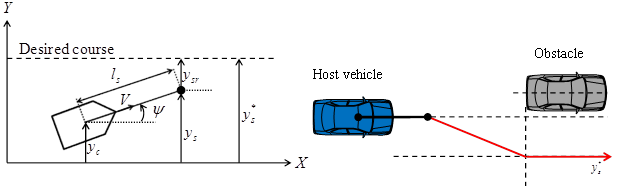
本研究では,「人との協調性が高い障害物回避のための操舵支援システムの開発」を目的とし,操舵トルクを入力とした障害物回避支援システムの開発と協調性の評価を行っております.協調性の評価は,ドライビング・シミュレータを使用し,ドライバに運転してもらうことで評価します.
RESEARCH ABSTRACT
This research purposes development and evaluation of autonomous lateral collision avoidance assistance system by steering torque input. Evaluate cooperation performance of system by using driving simulator.
 戻る
戻る