丂帺摦幵偺塣摦惈擻岦忋媄弍 (Vehicle Dynamics and Control)
丂帺摦幵偺塣摦惈擻岦忋媄弍 (Vehicle Dynamics and Control)
 帺慠側霓撞宿莞迋蓚▊瘋閬i忬懺慗堏儌僨儖偵婎偯偔乯僪儔僀僶塣揮峴摦儌僨儖偺峔抸
帺慠側霓撞宿莞迋蓚▊瘋閬i忬懺慗堏儌僨儖偵婎偯偔乯僪儔僀僶塣揮峴摦儌僨儖偺峔抸
Modeling of Ordinary Driving Behaviour based on State Transition Model
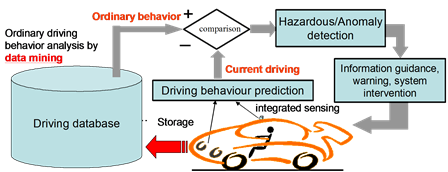
丂曕峴幰傗帺揮幵側偳偵懳偡傞帠屘偺杊巭傪栚揑偲偟偨梊杊埨慡憰抲偼丆僇儊儔傗儗乕僟乕側偳偺乬僙儞僒乕僼儏乕僕儑儞乭偵傛傞娐嫬擣抦傗忬嫷婋婡昡壙傾儖僑儕僘儉偵偟偨偑偭偰偄傑偡丏
丂偟偐偟幚幮夛偱偺晛抜偺塣揮帪偺峴摦偺娤嶡傗偦偺僨乕僞偺廂廤偼崲擄偱偁傞偺偑尰忬偱偡丏変乆偼僨乕僞廂廤偺庤抜偲偟偰丆忢帪婰榐壜擻側僪儔僀僽儗僐乕僟傪奐敪偟偰偒偰偍傝丆
丂摼傜傟偨僨乕僞傪僨乕僞儅僀僯儞僌傾儖僑儕僘儉傪梡偄偰張棟偟丆愭峴幵偵懳偡傞捛廬塣揮峴摦丆僽儗乕僉儞僌傗憱峴側偳偺條乆側忬嫷壓偺揟宆揑側僪儔僀僶偺塣揮峴摦儌僨儖偺峔抸傪峴偭偰偄傑偡丏
丂偙偺儌僨儖壔偼堎側傞忬嫷壓偵偍偗傞婯斖揑峴摦傪偁傜傢偡偙偲偵傕桳梡偱偁傞偲峫偊傜傑偡丏
RESEARCH ABSTRACT
丂The active safety devices that prevent accidents related to vulnerable road users such as pedestrians and cyclists rely on environment perception and situation risk assessment algorithms supported by the 乪sensor fusion乫 of cameras and radars.
丂A challenging aspect of research in this area is the study of naturalistic driving behaviour based on the observation and storage of real world driving behaviour data.
As a tool for the data collection process we have developed a continuously sensing drive recorder. The recorded data are processed using data mining algorithms to construct a profile of typical driver action in various situations, e.g., car-following, braking and cruising.
丂This data乚driven modeling method is also used to describe normative behavior in different situations.
 栠傞
栠傞