パワーエレクトロニクス
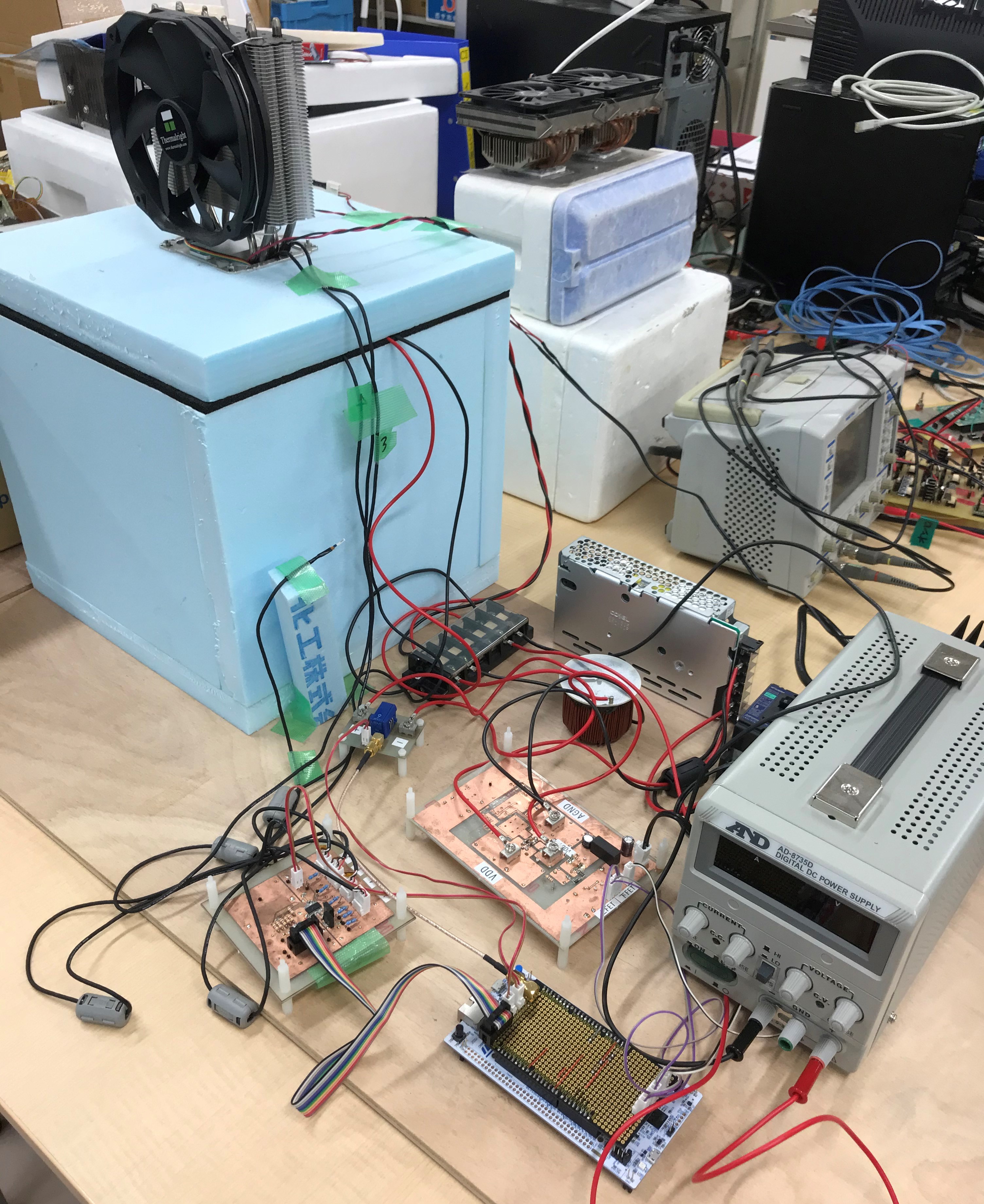
熱電発電(実験装置:自作)
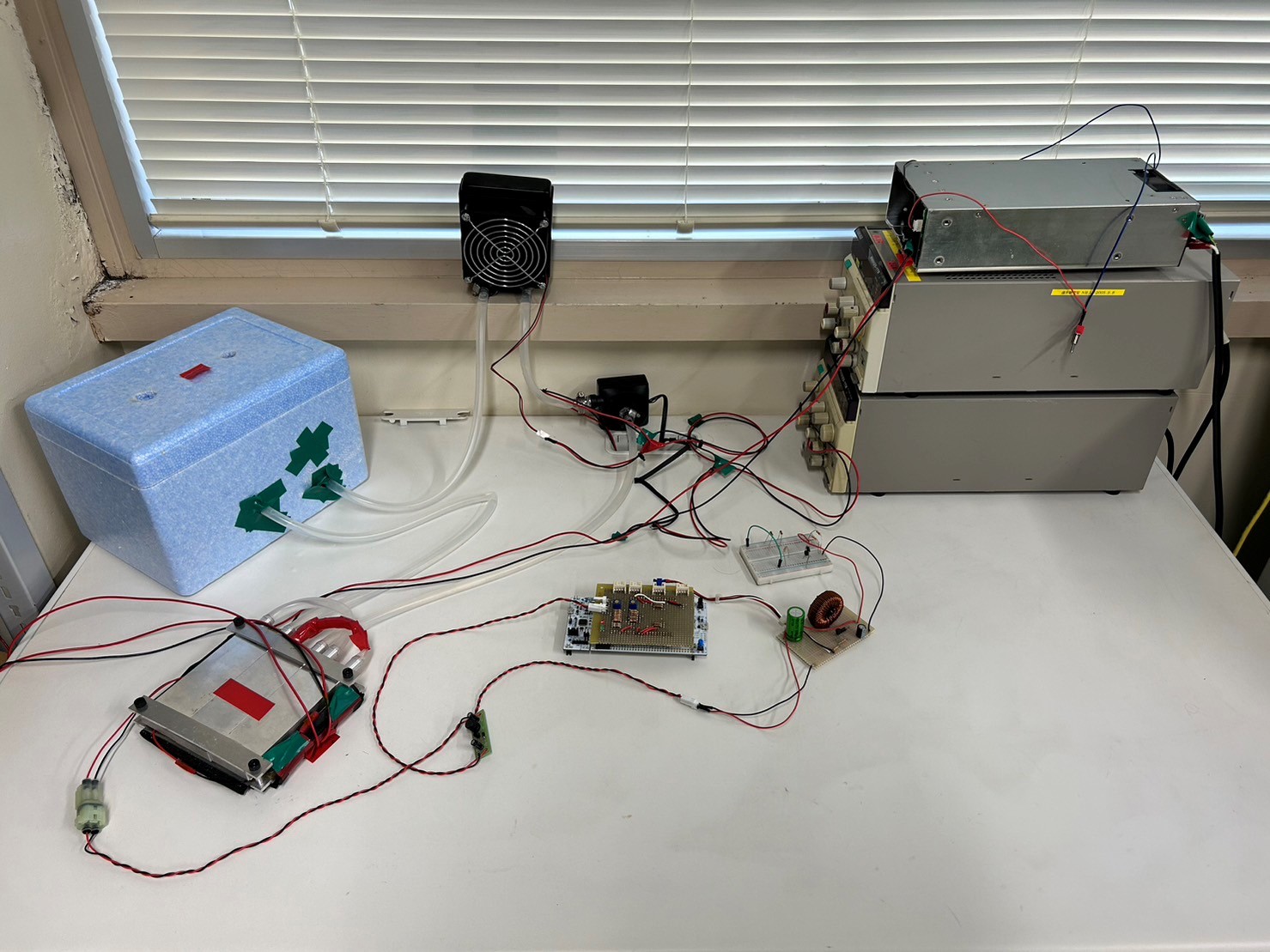
キーワード|DC-DCコンバータ、エネルギーハーベスティング、ゼーベック効果熱エネルギーを電気エネルギーに変換する熱電発電は、工場や自動車などから排出される廃熱を利用できるうえ、二酸化炭素を排出せずに発電できるため、 エネルギー効率化や温室効果ガス排出量削減が求められる昨今において世界的に注目を集めています。 しかし、出力電圧が高温側と低温側の温度差に依存するため、安定した電圧を得るためにはDC-DCコンバータなどの補助回路が必要になります。 そこで本研究では, DC-DCコンバータを用いた出力電圧制御に関する研究を行っています。
ワイヤレス電力伝送(実験装置:自作)
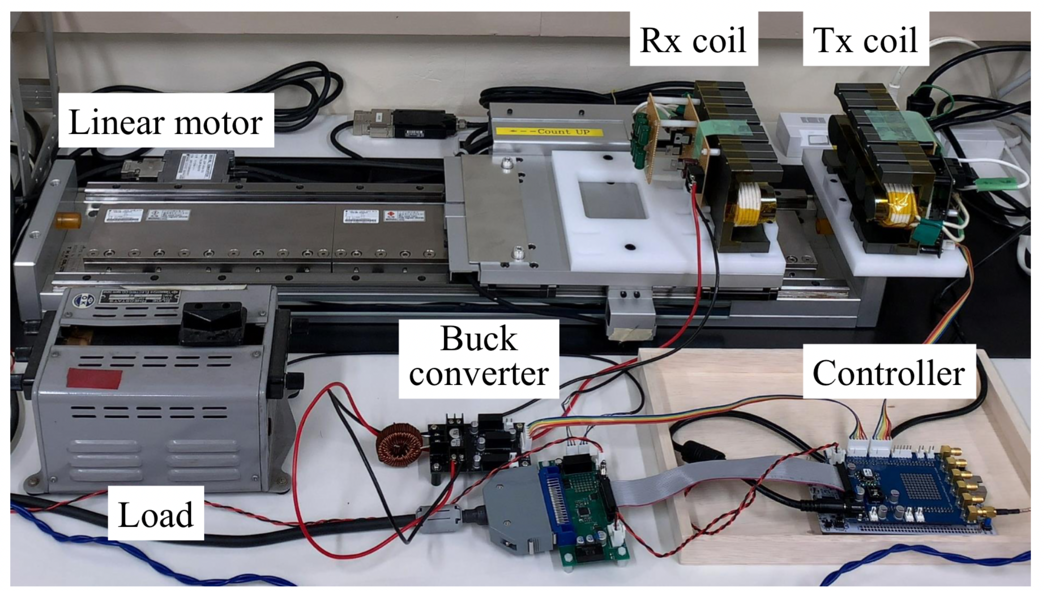
キーワード|磁界共振結合方式、DC-DCコンバータ、インピーダンス整合無線で電力を伝送するワイヤレス電力伝送システムは電子機器や電気自動車など幅広い分野での応用が期待されており、次世代の給電方式として注目されています。 伝送方式の一つである磁界共振結合方式は位置ずれに強く高効率での電力伝送が可能である一方、負荷インピーダンスや相互インダクタンスにより効率や電力が変化する特性があります。 そのため本研究室では、コイル位置制御と受電側DC-DCコンバータによる電力と効率の同時制御や、システムの効率最大化などを目的とした非線形制御系設計に関する研究を行っています。 また、コイル位置を高精度で制御するリニアモータやインピーダンス変換を行うDC-DCコンバータをはじめとした実験設備により、実際のワイヤレス電力伝送システムに基づいた制御系設計を行っています。
メカトロニクス
マイクロハンド(実験装置:自作)
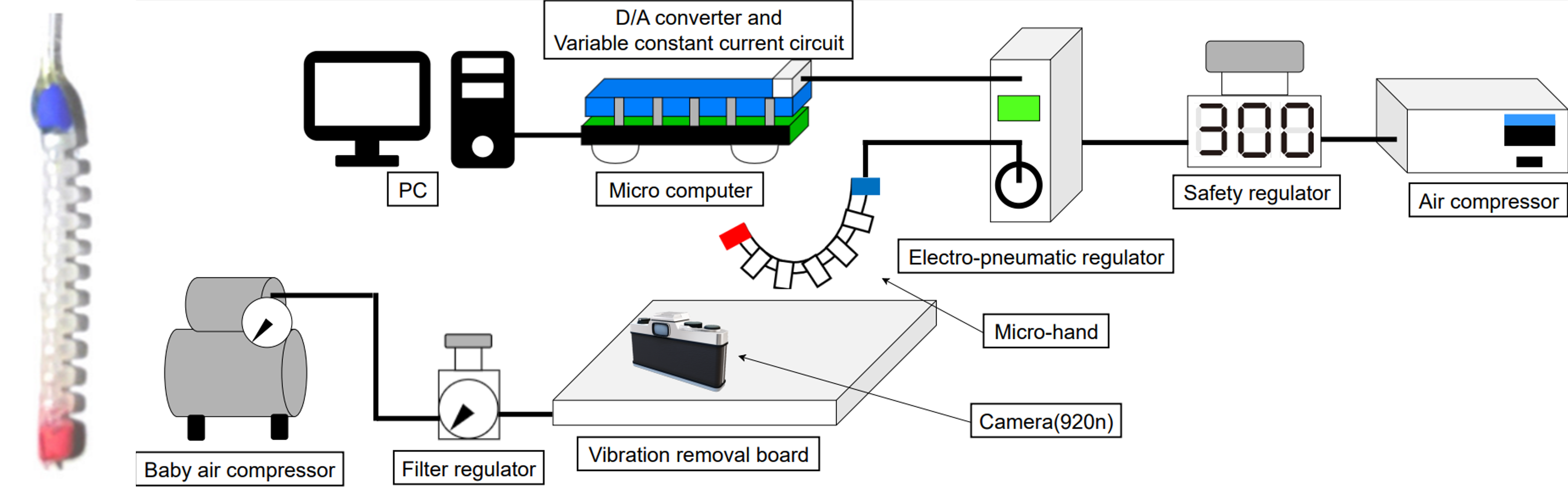
キーワード|ソフトアクチュエータ、スライディングモード制御、センサレス制御、機械学習、群知能マイクロハンドとは、医療・バイオテクノロジー・福祉といった分野での応用が期待されているソフトアクチュエータです。 マイクロハンドは片側に蛇腹構造を持つ空気圧駆動型のアクチュエータで、この構造により2方向への大きな湾曲動作を生じさせることができます。 医療分野での実用化を考え、マイクロハンドの変位を観測できない場合においても制御できるように、機械学習の1種であるSVR(サポートベクター回帰)を使ったセンサレス制御などの研究をしています。
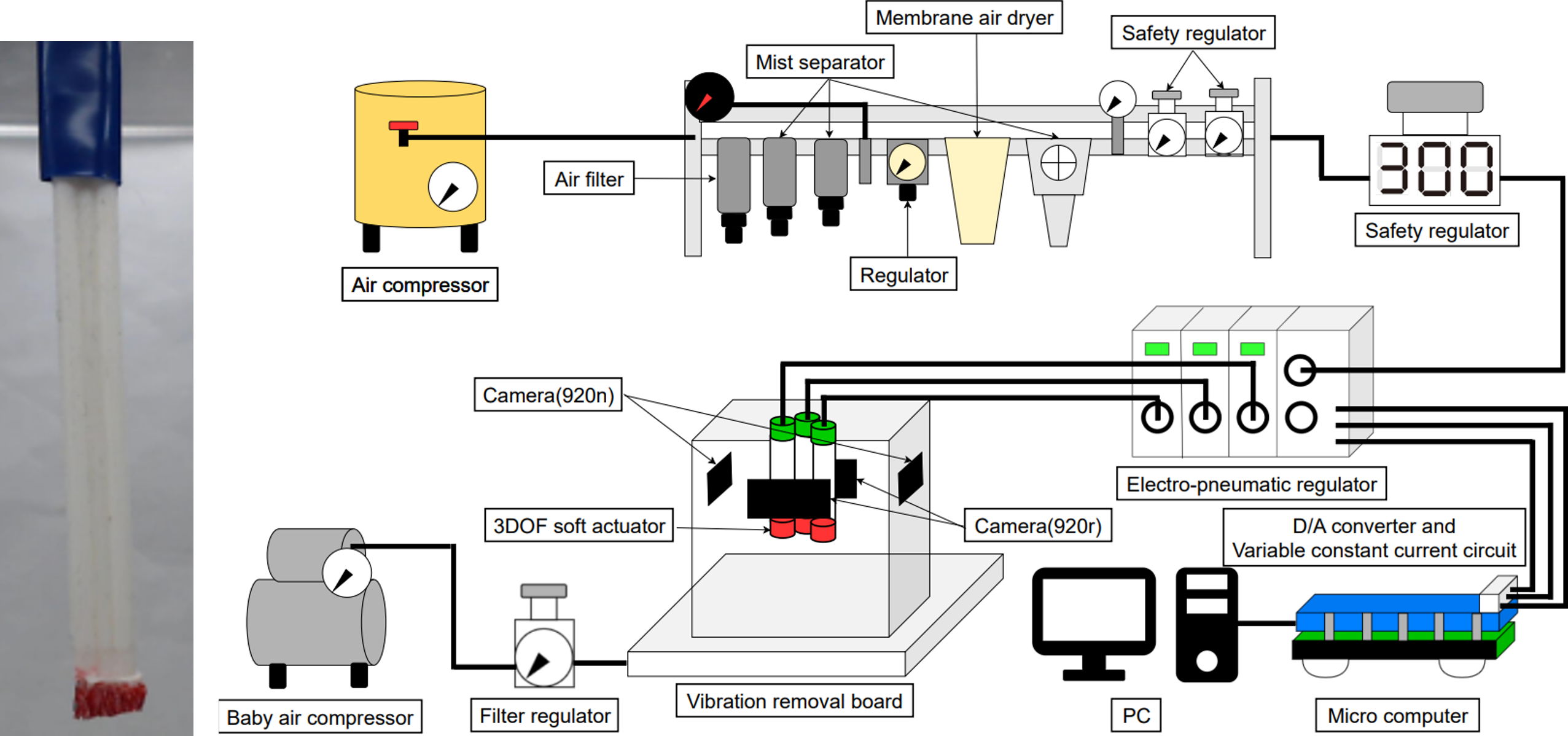
3-DOF(Degree of Freedom)ソフトアクチュエータ(実験装置:自作)
キーワード|ソフトアクチュエータ、センサレス制御、機械学習、群知能3-DOFソフトアクチュエータもマイクロハンドと同様に、医療・バイオテクノロジー・福祉といった分野での応用が期待されているアクチュエータです。 3-DOFソフトアクチュエータは3本の人工筋肉を束ねた空気圧駆動型のアクチュエータで、マイクロハンドとは異なり3つの空気圧のパターンの組み合わせで様々な方向への湾曲させることができます。 こちらも、医療分野での実用化を考え、機械学習の1種であるMSVR(多出力サポートベクター回帰)を使ったセンサレス制御などの研究をしています。
プロセス制御
DCS
キーワード|分散制御システム、DCS、熱交換器化学プラントなどの大規模なプラントを考えた場合、様々なプロセス機器を使用します。このようなプラントでは、各プロセスの操作監視を行うことが難しくなります。 そこで、分散制御システムDCS(Distributed Control System)を導入します。 DCSによりプロセスを統合的に制御することが可能となり、プラントの安全性を確保することができます。 本研究室ではDCSや熱交換器を用いて実際のプラントを想定した研究を行っています。

ワークステーション
キーワード|GPU、並列処理、機械学習ワークステーションとは、主に専門的な作業や高度な計算処理が必要なタスクに特化した、高性能で高機能なコンピュータのことを指します。 本研究室では、特にワークステーションのGPUに焦点を当て、研究を行っています。GPUは多数のコアを持っており、同時に多くのタスクを処理することができます。 これは、並列処理を行う機械学習などの数値計算において大きな利点となります。

タンクシステム
キーワード|プロセス制御、MIMO制御、早期故障検知、耐性制御、SVM、ChangeFinderプラントの製造工程を対象とした制御をプロセス制御といいます。 プロセス制御では、装置の温度・液位・圧力・流量等を制御することで原料を科学的・物理的に変化させ、製品へと加工しています。 プロセス制御は他入力・多出力制御(MIMO制御)であるため、他の系からの干渉が発生します。 タンクシステムはその汎用性の高さから、プロセス制御においてよく使用される装置であり、この装置を使用して、干渉などのプロセス制御特有の問題を解決するために、日々研究を行っています。
スパイラル熱交換器
キーワード|プロセス制御、熱交換私たちの身の回りのものを支えている化学プラントや電力プラントでは、プロセス制御と呼ばれる制御技術が使われています。 プロセス制御とは、目的の製品の品質や生産量を安定させるために、プラントの至るところにあるプロセスの流量・温度・圧力を制御する技術です。 本研究室では、プロセスの一つである熱交換プロセス装置を所持しており、実際のプロセス産業で活躍できるような制御技術を生み出すための研究を日々行っています。

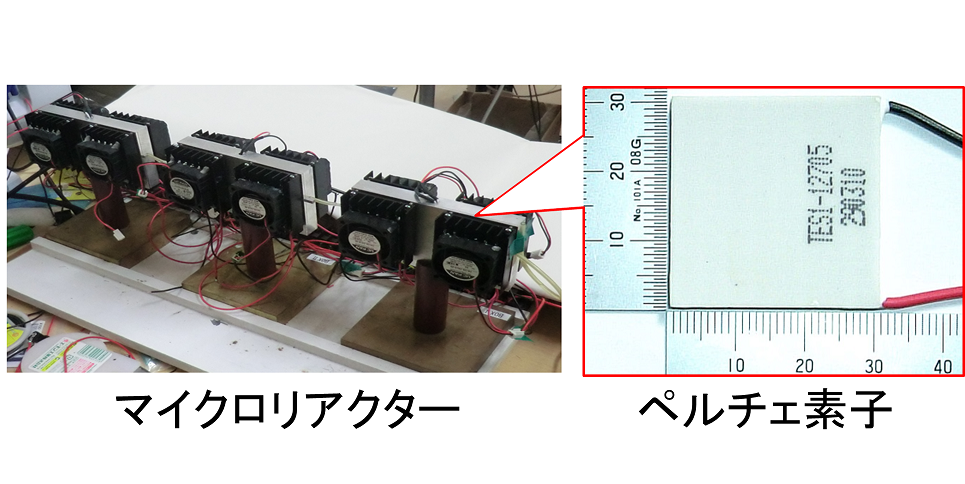
マイクロリアクター(実験装置:自作)
キーワード|ペルチェ素子、故障耐性微小な化学反応を行うマイクロリアクタと呼ばれる装置で安定的な化学反応を行うために、温度制御を行っています。 この制御対象に、電流を流すことで両面に温度差が発生する特性を持つペルチェ素子を使用して制御を行います。 また、経済的な制御を行うために、非線形制御に機械学習を組み合わせた取り組みを行っています。 例として、温度センサの数を減らすためのセンサレス制御や、センサが故障した場合に検知と正常な制御の続行を行う故障耐性制御があります。
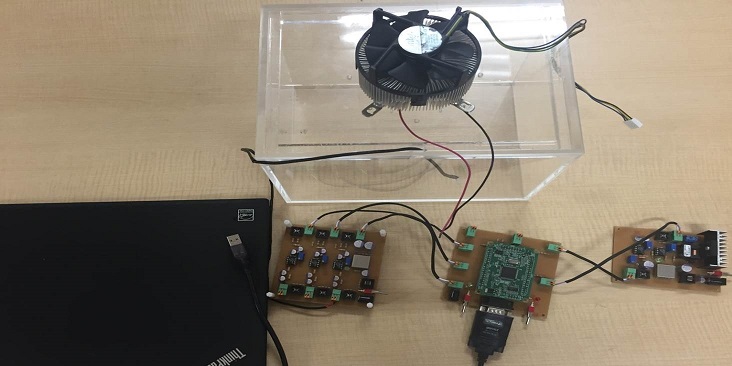
冷温庫(実験装置:自作)
キーワード|ペルチェ素子、温度制御本研究ではペルチェ素子を用いた温度制御を行っている。 ペルチェ素子とは、熱電変換素子の一つであり、電流を流すと素子の片面が放熱し、もう片面が吸熱する性質を持っている。 現在では小型の冷蔵庫やCPUクーラーとして活用されている。 このように吸熱作用を利用する一方、他面の熱は無駄なエネルギーとして放出されている。 そこで、この排熱を利用して保温と冷却が同時に行えるシステムの設計及びその温度制御を行うことで、ペルチェ素子の新しい利用方法の提案を行う。
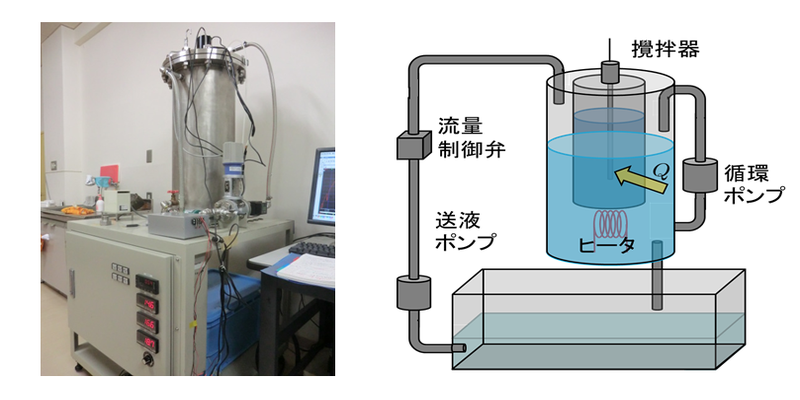
熱量測定システム(実験装置:自作)
キーワード|ペルチェ素子、温度制御、電力損失、電力変換機器本研究ではペルチェ素子を用いて電力変換機器の電力損失を行っています。 ペルチェ素子とは、熱電変換素子の一つであり、電流を流すと素子の片面が放熱し、もう片面が吸熱する性質を持っています。 このペルチェ素子を用いて電力変換機器から放出された熱量をペルチェ素子に吸熱させることで電力損失を測定することができます。 ペルチェ素子を用いることで従来の電力計を用いた測定法よりも電力損失を高精度に測定することできます。さらなる精度の向上、測定時間の短縮を目指し日々研究を行っています。
スマート材料
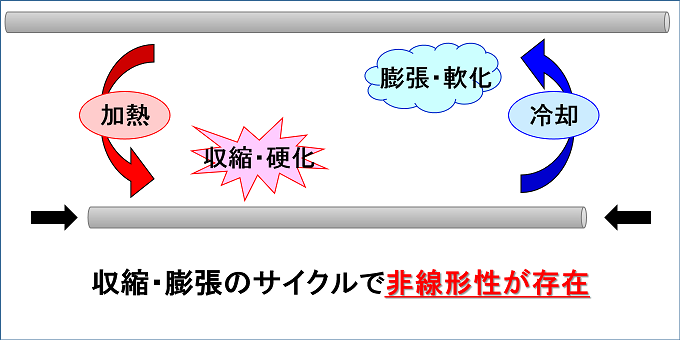
形状記憶合金(SMA: Shape Memory Alloy)(実験装置:自作)
キーワード|非線形性、アクチュエータスマート材料の1つである形状記憶合金(SMA: Shape Memory Alloy)は、加熱すると膨張、冷却すると収縮する性質を持ちます。他の材料と比較して軽量で出力対質量比が大きいなどの利点があり、様々な研究がなされています。 しかし、SMAには収縮と膨張のサイクルで非線形性が存在します。
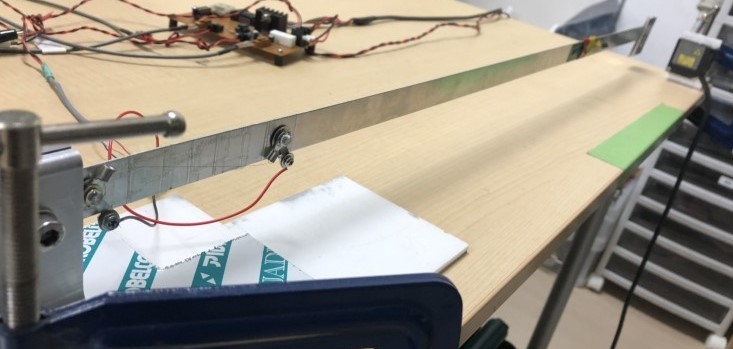
フレキシブルアーム(実験装置:自作)
キーワード|形状記憶合金、振動制御近年、産業分野などにおいて、コスト削減や動作速度向上などのために、アームが軽量化される傾向があります。 この軽量化により、アームは剛性を失い、高速な動作が困難となる問題があります。 一方で、スマート材料の1つである形状記憶合金(SMA: Shape Memory Alloy)は、他の材料と比較して軽量で出力対質量比が大きいなどの利点があり、様々な研究がなされています。 しかし、SMAには非線形性が存在するため制御性能に悪影響を与える危険性があります。 本研究では、フレキシブルアームを制御対象、SMAをアクチュエータとして、非線形性を考慮した振動制御を行っています。

L型ロボットアーム(実験装置:自作)
キーワード|圧電素子、振動制御、ヒステリシス作業効率を上げるためにロボットアームは軽量化が進んでいます。 しかし、その一方で振動が大きくなってしまうため、作業効率に悪影響を与えることが問題となっています。 そこで圧電素子を使用してより早く振動を抑えることを目的としたL型ロボットアームの振動を制御する研究を行っています。 圧電素子は電圧を印加することで形状を変えることができます。 その一方、ヒステリシスと呼ばれる非線形性を有しています。 この性質を考慮して振動を制御するモデルの設計をしています。
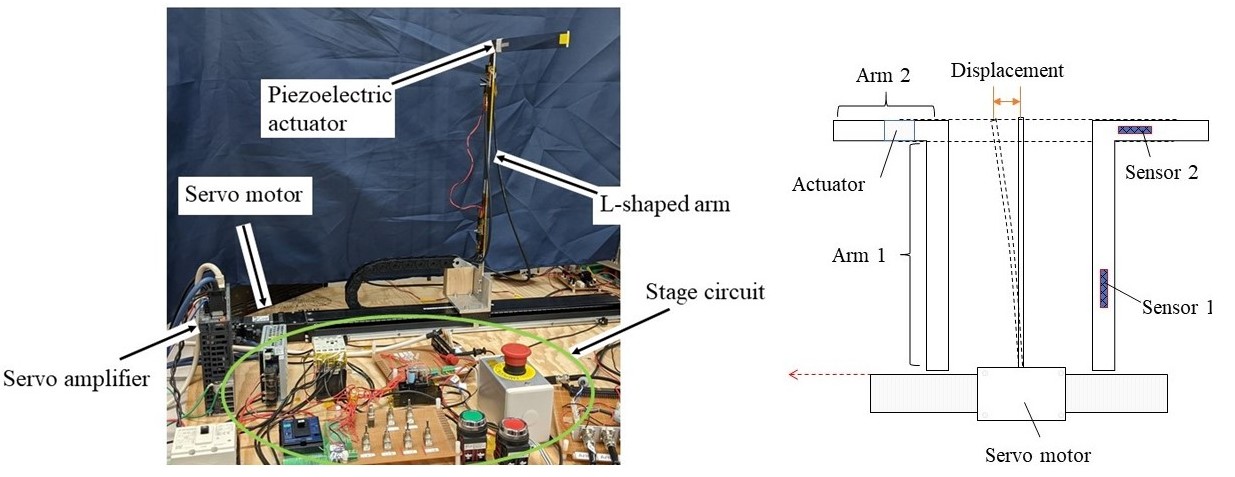
L型アーム(実験装置:自作)
キーワード|サーボモータ、圧電アクチュエータ、非線形振動制御、オペレータ理論近年、様々な産業システムにおいて使われているロボットアームはアームを軽量化することで高速な動きを実現しています。 しかし軽量化によりアームの柔軟性が増し、振動が増加してしまい、動きの精度に問題が生じます。 本研究では、サーボモータと圧電素子をアクチュエータとして使用し、L型アームの振動を制御しています。圧電素子にはヒステリシスと呼ばれる非線形を有しています。 このヒステリシス特性を考慮した上で振動制御を行っています。また、制御器のパラメータを調整するために機械学習手法の1つであるアリコロニー最適化(ACO)を用いています。
平板構造物(実験装置:自作)
キーワード|振動制御、ヒステリシス補償構造物に生じる振動を抑制することで、疲労破壊を防止することを目的として研究に取り組んでいます。近年、航空機などの構造物は軽量化が進み、振動が発生しやすくなる課題があります。 本研究室では、電圧を加えると曲がる特性を持つ圧電素子を平板に2か所に設置することで振動抑制を実現しています。圧電素子は動作に非線形性を持ち精密に制御することが困難であるという課題があります。 そこで、オペレータ理論と呼ばれる非線形制御理論を適用することでこの課題に対処しています。本研究ではシミュレーションと実機実験を行い、 PC上でうまくいくのかを確認した後、実世界でも実現可能か検証をするプロセスをたどっており、基礎的な研究力を身に着けることができます。 また、制御工学だけでなく機械学習をはじめとするAI技術も利用しており、振動を抑制するために様々な手法を提案しております。
非線形位置制御
空圧ステージ
キーワード|空気圧システム、位置制御、ステージ近年、安価で省メンテナンスであることから空気圧制御システムが注目されています。空気はクリーンで安全な特徴があり、エコロジーなエネルギーとして身近に利用されています。 空気圧方式は電気方式と比べて構造が簡素であり保守運用が容易であることが利点として挙げられますが、位置決め精度は劣ってしまう問題があります。 そのため、位置決めのアクチュエータとして実用化させるために、空気圧制御システムを用いた高速かつ高精度の位置制御に取り組んでいます。
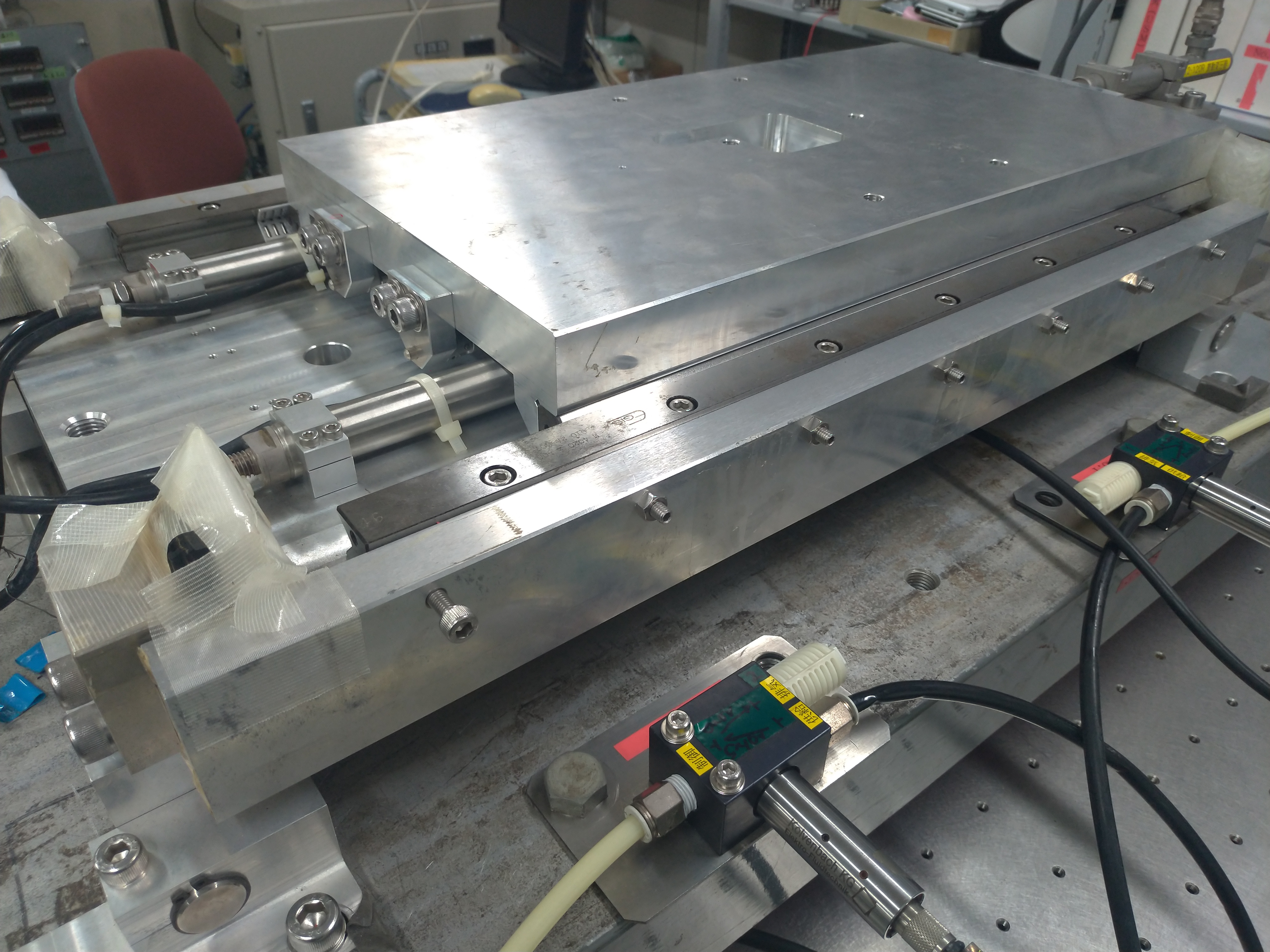
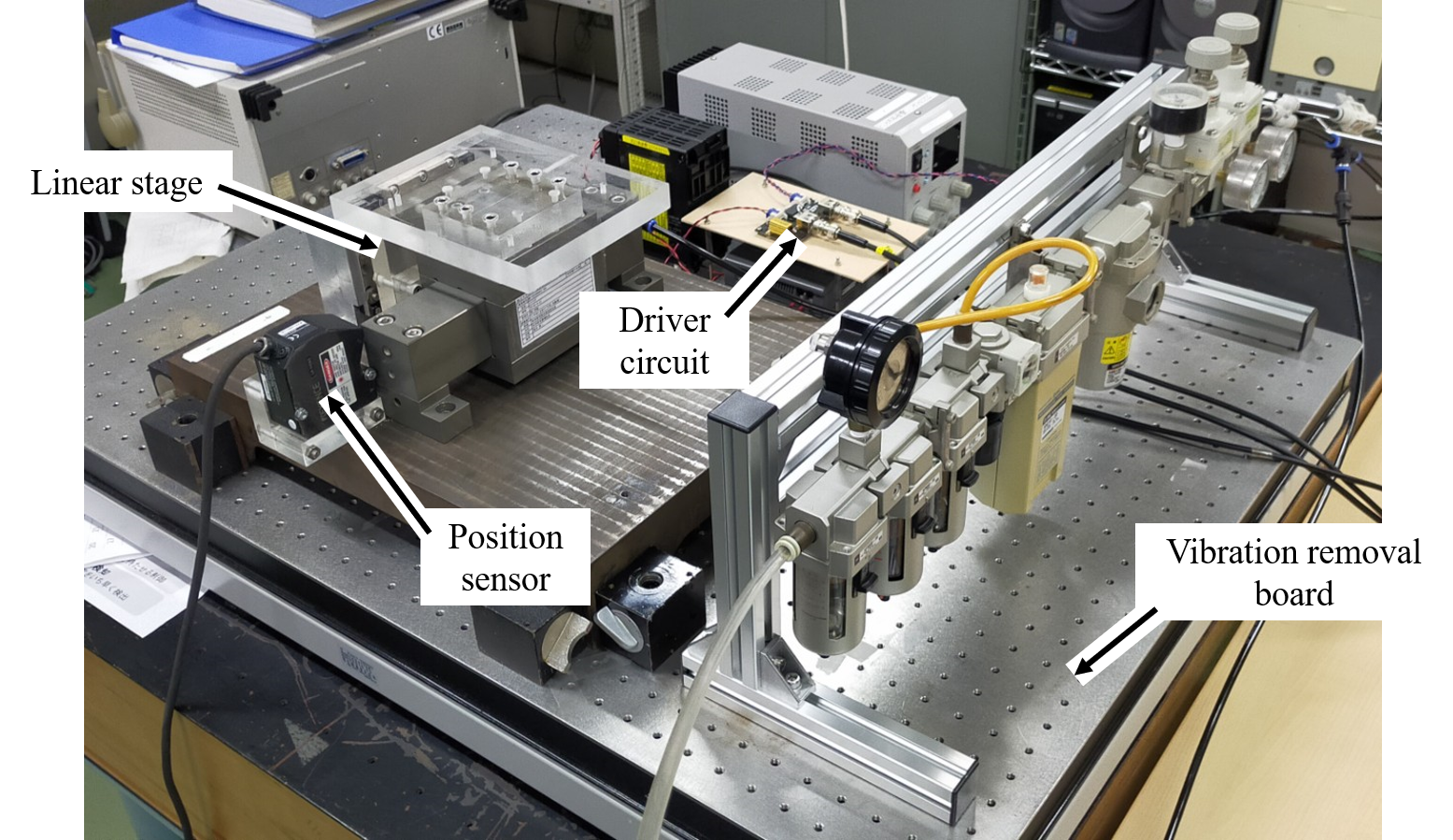
リニアモータ
キーワード|半導体製造、非線形モデル、完全追従制御本研究では半導体製造ステージに用いられるリニアモータの位置制御について研究を行っています。 現在、スマートフォンをはじめとするスマートデバイスに対する需要の急激な拡大および高性能化が進展しており、今後も更なる進展があると考えられます。 これらの製造のために、半導体デバイスの小型化や生産性の向上が求められています。超小型半導体デバイスの製造のためには、半導体製造装置の性能向上が必要不可欠です。 半導体製造装置にはリニアモータによるステージが用いられており、本研究ではこのステージの高精度な位置決めを目的としています。 現在、同様の研究が多く行われていますが、そのほとんどが単純な線形制御で行われています。しかし、超高精度な動作において線形制御では誤差が残ってしまします。 そこで、本研究ではステージに用いられているリニアモータの内部構造に着目した非線形数理モデルとそのモデルを用いた非線形制御について研究を行っています。 本手法を用いることで、これまでの手法に対してモデルの誤差による影響が抑制されることが期待されます。