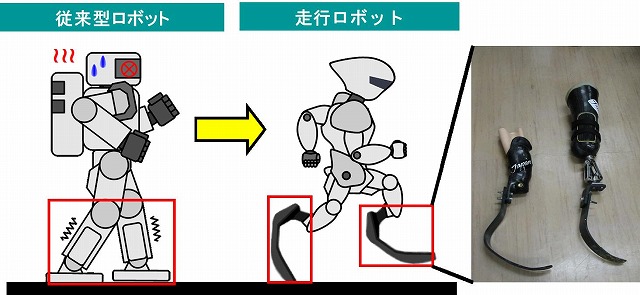
ヒューマノイドロボットに代表される2足歩行ロボットでは,人間と同じ環境で行動し,人間を支えることが期待されている.しかし,その活用範囲を人間の生活環境まで拡大するには,運動性能の向上が必要である.本研究では運動性能のうち走行性能の向上を図る.
脚部を単純化するため,走行機構としてスポーツ義足に使われるばね足に着目した(図1).
田川研が目指すロボット
ロボットの跳躍動作
ばね足を用いた走行動作は跳躍動作の繰り返しであり,跳躍ロボットとみなすことができる.そのため,ばね足にエネルギを蓄積することで跳躍を行う(図2)
偏心重錘とは回転軸に対して重心が偏心している錘のことであり,回転することで発生する遠心力を利用した機構である.この機構は既に携帯電話のバイブレーションモータや杭打機の起振器等に用いられている.この機構はシンプルな構造であることと,またに小型に設計することが容易であるため,ロボットへの実装性に優れると考えられる.
跳躍ロボットのモデル
ロボットの姿勢安定化
また,提案するロボットでは両足を離した走行を目標としているため,従来の理論で姿勢安定化を図るのは困難である.そこで中間駆動関節を有する二重倒立振子 (以下MDIP)による姿勢安定化制御を提案する.
提案する手法はロボットの上半身の動きを利用することで姿勢制御を行う.そこで図3 に示すような二足歩行ロボットの上半身と下半身を一本の棒とみなし,腰部を駆動関節,足元を自由関節としたMDIP モデルを提案する.このモデルを用いて,直立状態だけでなく,実際の走行時を考慮して,大きく姿勢の変化する状態を線形パラメータ変動系(Liner Parameter Varying systems :LPV 系 )として姿勢制御則の開発を本研究の目的とする.図4に直立状態でのシミュレーション結果を示す.
ロボットのモデル
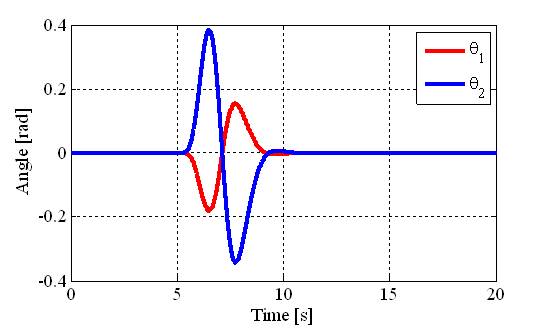
先端に外力を加えた場合の姿勢安定化シミュレーション
角度が0°に向かって収束(姿勢安定化)している