Keynote speaker
MengChu Zhou, Ph.D. & Distinguished Professor, Fellow of IEEE, IFAC, AAAS, CAA and NAI

Title:
Particle Swarm Optimizers with Mobile Robots as Particles: A Novel Paradigm for Effective Optimization
Abstract:
A Particle Swarm Optimizer (PSO) and mobile robot swarm are two widely studied subjects. Many applications emerge separately while the similarity between them is rarely explored. When a solution space is a certain region in reality, a robot swarm can replace a particle one to explore the optimal solution by performing PSO. In this way, a mobile robot swarm should be able to efficiently explore an area just like a particle swarm and uninterruptedly work even under the shortage of robots or in the case of unexpected failure of robots. Furthermore, the moving distances of robots are highly constrained because energy of robots is limited and so is their operation time. Inspired by such requirements, this presentation discusses a Moving-distance-minimized PSO for a mobile robot swarm to minimize the total moving distance of its robots while performing optimization and collaboration. The distances between the current robot positions and the particle ones in the next generation are utilized to derive paths for robots such that the total distance that all robots move is minimized, hence minimizing the energy and time for a robot swarm to locate the optima. Experimental results on optimizing benchmark functions show the advantage of the proposed method over the standard PSO. By adopting it, the moving distance of robots can be reduced by more than 40% while offering the same optimization effects. The implication is enormous since all population-based optimization algorithms can be potentially benefited from such replacement of their individuals with mobile robots, thus leading to their moving-distance-minimized variants.
Brief Biography:
MengChu Zhou received his B.S. degree in Control Engineering from Nanjing University of Science and Technology, Nanjing, China in 1983, M.S. degree in Automatic Control from Beijing Institute of Technology, Beijing, China in 1986, and Ph. D. degree in Computer and Systems Engineering from Rensselaer Polytechnic Institute, Troy, NY in 1990. He joined New Jersey Institute of Technology (NJIT), Newark, NJ in 1990, and has been Distinguished Professor in Electrical and Computer Engineering since 2013. His research interests are in Petri nets, intelligent automation, AI, Cloud/edge Computing, Internet of Things, big data, web services, and intelligent transportation. He has over 1200 publications including 17 books, 850+ journal papers (650+ in IEEE transactions), 31 patents and 32 book-chapters. He is the founding Editor of IEEE Press Book Series on Systems Science and Engineering, and Associate Editor of IEEE Internet of Things Journal, IEEE Transactions on Intelligent Transportation Systems, and IEEE Transactions on Systems, Man, and Cybernetics: Systems. He was Editor-in-Chief of IEEE/CAA Journal of Automatica Sinica (2018-2022). He is a recipient of Humboldt Research Award for US Senior Scientists from Alexander von Humboldt Foundation, Franklin V. Taylor Memorial Award and the Norbert Wiener Award from IEEE Systems, Man and Cybernetics Society, Excellence in Research Prize and Medal from NJIT, and Edison Patent Award from the Research & Development Council of New Jersey. He has been among most highly cited scholars since 2012 and ranked top one in the field of engineering worldwide in 2012 by Web of Science. His present Google citation count is well over 72,400 with h-index being 137. He was ranked #99 in the world among the 2023 Top 1000 Scientists in Computer Science in the World by Research.com. He is a Fellow of IEEE, International Federation of Automatic Control (IFAC), American Association for the Advancement of Science (AAAS), Chinese Association of Automation (CAA), and National Academy of Inventors (NAI).
Prof. Kazuyuki Ito, Hosei University, Tokyo Japan
Title:
Bioinspired Soft Robots: Flexibility and Softness Are the Keys to Realizing Adaptive Behaviors
Abstract:
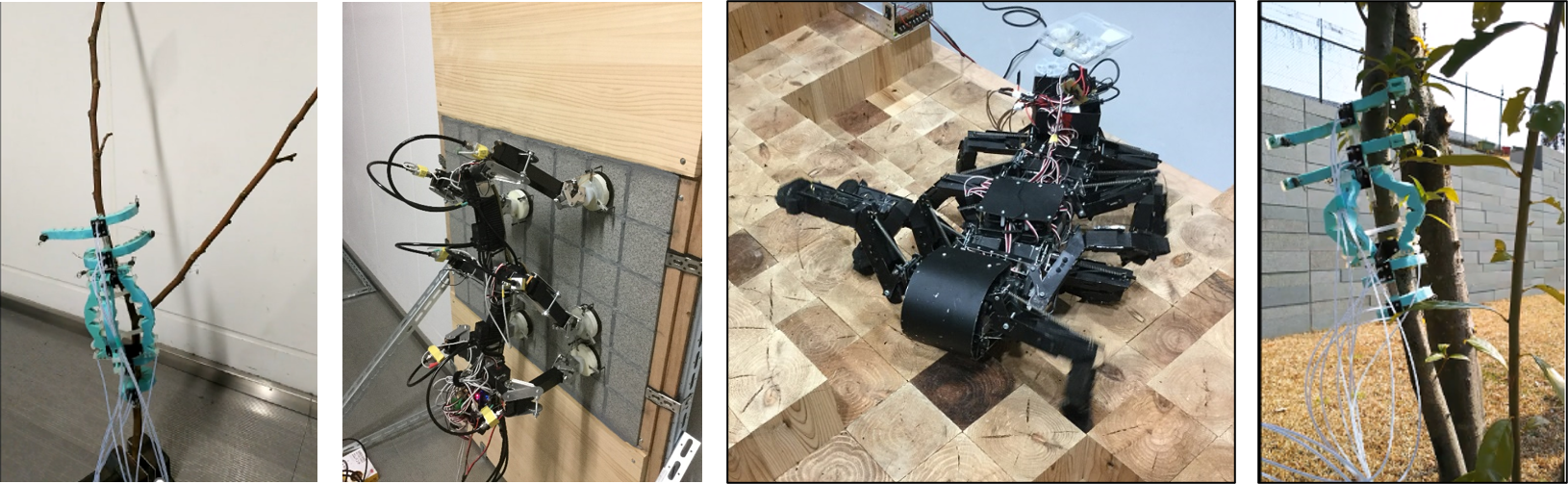
Recent advancements in artificial intelligence have been extraordinary, with AI surpassing human capabilities in certain functions. Nevertheless, the operation of autonomous robots in unknown and complex environments, such as natural settings and disaster sites, is still impossible. To tackle this issue, various research has been conducted, and we considered that the problem is that the amount of information is too huge to calculate in real-time in such complex environments. On the other hand, by focusing on lower creatures, it is observed that they exhibit adaptive behaviors in complex environments despite having small brains or, in some cases, no brain at all, and their computational capacity is highly limited. Instead of relying on brain function, these organisms' bodies are controlled through interactions with their environment. In our research, we have incorporated this mechanism, and we developed various bio-inspired robots, including an octopus-like manipulator, a centipede-like robot, and robots capable of climbing walls and pipes. This presentation will introduce our bio-inspired robots and demonstrate that flexible mechanisms and the softness of the body are crucial to achieving adaptive behavior.
Brief Biography:
Kazuyuki Ito received his Ph.D. from the Tokyo Institute of Technology in 2002. In the same year, he joined the Department of Systems Engineering at Okayama University as a Research Associate. In 2005, he joined the Department of Systems and Control Engineering at Hosei University as an Assistant Professor. From 2022 to 2024, he served as the Dean of the Faculty of Science and Engineering at Hosei University. He is currently a Full Professor in the Department of Electrical and Electronics Engineering at Hosei University. He received the Young Investigator Excellence Award from the Robotics Society of Japan in 2003, the Funai Information Technology Award for Young Researchers in 2004, the Kisoi Motohiro Award (Academic Achievement) from the International Rescue System Institute in 2013, and the Best Paper Award at the IEEE International Conference on Intelligent Systems in 2020.
Prof. Kiyotsugu Takaba, Ritsumeikan University, Shiga Japan

Title:
Data-driven control design for multi-agent synchronization
Abstract:
The importance of data-driven methodologies for control engineering has been increasing with the development of data science technologies. The data-driven methodology enables an efficient control system design by directly utilizing experimental response data without going through modeling or system identification processes. It may be noted that van Waarde and his co-workers (IEEE TAC vol. 65, no. 11, 2020) recently proposed the notion of data informativity which characterizes the response data necessary for achieving a given control objective such as stabilization. This talk is concerned with the data-driven synchronization problem for linear multi-agent systems from the viewpoint of data informativity. It is challenging to apply a data-driven technique to a multi-agent system since the agents in the system obtain their response data required for the control design in a distributed and individual manner. Therefore, we will discuss the data-driven synchronizing control design focusing on what data is needed to guarantee synchronizability (the existence of a synchronizing distributed controller) and how to aggregate enough data from all agents to design the desired synchronizing controller.
Brief Biography:
Kiyotsugu Takaba received his B.Eng., M.Eng., and Dr.Eng. degrees all from Kyoto University, Japan, in 1989, 1991, and 1995, respectively. From 1991 to 1998, he was an Assistant Professor at the Department of Applied Mathematics and Physics, Kyoto University. From 1998 to 2012, he was an Associate Professor at the same department. In 2012, he joined the Department of Electrical and Electronic Engineering, Ritsumeikan University, where he is currently a Professor. His current research interests include linear system theory, optimal control, robust control, optimal filtering, multi-agent system and their applications. He is a member of IEEE, SIAM, SICE, and ISCIE.