 Spherical UltraSonic Motor Spherical UltraSonic Motor
The Spherical Ultrasonic Motor (SUSM) can rotate in 3 degree of freedom
(DOF). This is an original technology at Toyama laboratory. It has characteristic
of an Ultrasonic Motor, such as high-responsibility.
Structure and Driving principle
As shown in Fig.1, the SUSM is composed of a sphere and three annular stators.
The stators (Fig.2 is the detail of this stator) hold sphere (spherical
rotor). As shown in Fig.3, the three stators produce torque around each
axis. Compositing each torque makes it possible to generate 3DOF rotation.
Rotational direction and speed can be controlled by changing the torque
at each stator.
In order to make 3DOF, generally, three electromagnetic motors are required,
and it make the structure very complicated and large. The SUSM can generate
3DOF by single actuator and it can be compact. Also this simple structure
makes miniaturization possible. We achieved the SUSM with a small diameter
of 15 mm. Fig.4 shows the movement of the SUSM controlled by a joystick.
|
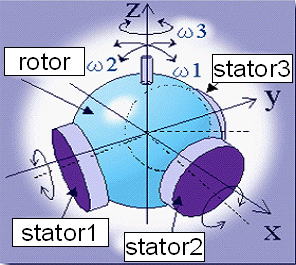
Fig.1 Structure of Spherical UltraSonic Motor
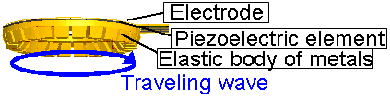
Fig.2 Enlarged view of the stator
|
Fig.3 Composition of driving force from 3 stators
|
|
We are studying further about Inspection of Industrial Piping robot, using
our knowledge of the SUSM.
Industrial-piping inspection Robot
Nowadays, pipline network including water pipe, gas pipe and sewer pipe
covers the urban city, and the cost and time spent on its maintenance is
increasing greatly. For this reason, we suggest the Industrial- Piping
inspection Robot. By using this inspection tool, the cost and time spent
can be reduced remarkably.
Using the SUSM as camera acturator at the head section, the camera can
be directed anywhere, as far as 135 degrees. Because it has a joint section,
it can move through L-tube.
|
Fig.5 Inspection of industrial piping robot
Fig.6 Head section of inspection robot
|
Copyright(c)2009 Toyama laboratory. All rights reserved.
|
