Structure of ultrasonic micro motor
Fig.1 shows the schematic of the ultrasonic micro motor. The micro motor
consists of an external vibrator, a wave guide, a stator and a rotor. The
composition of the micro motor is very simple. The thin wire made
stainless steel receives ultrasonic vibration from the vibrator that is
attached to one end of the waveguide and propagates ultrasonic vibration
to a helical coil (stator).
The progressive flexural wave in the helical coil generates micro frictional
force at the contact points between the rotor and the coil type stator
and the sum of these micro frictional forces can produce an elliptical
motion to rotate the rotor. During this time, the micro frictional force
works oppositely to the forward direction of the progressive wave. The
rotor performs a rotary motion and a translational motion.
Development of miniature ultrasonic micro motor
To achieve the practical use of miniature IVUS system, an ultrasonic micro
motor with casing part which is thinner than 1.0 mm in the diameter is
developed. Fig.2 shows the photograph of the miniature motor. The dimension
of this motor is 0.95 mm in outer diameter and 4.5 mm in length.
Future perspective
There still remain many technological barriers. They are, to make the driving
principal of the motor clear, to simulate the mechanism using finite element
method, to miniaturize, to increase torque and to be established IVUS using
this motor. Moreover, this IVUS is going to be performed to observe the
internal vessel in human blood vessel model and in the future it is desired
that this IVUS is not only observed but also treated to the diseased part
in blood vessel.
|
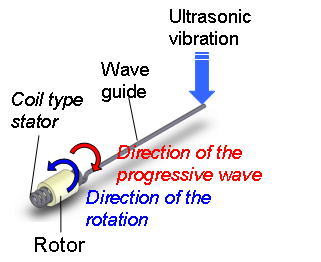
Fig.1 The schematic diagram
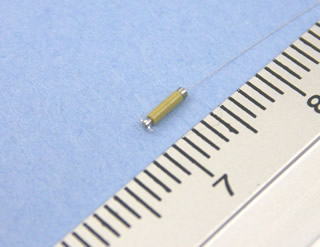
Fig.2 Miniature motor ( φ0.95 mm)
|
