リンク機構とは剛体とみなしたリンク部材を対偶で繋いだ機構である.例えば,電車の上のパンタグラフ,車のワイパーはリンク機構とみなせる. これらの設計では,目的の運動を狙ってリンク部材の寸法,関節の種類と方向が決定される.
身の回りにはリンク機構が多く見られるが,対偶には1自由度対偶である回転対偶,直動対偶が多用されている. 1自由度対偶にはもう一つ,ねじ対偶があるものの,ねじ対偶を用いた機構の例は非常に限られている.
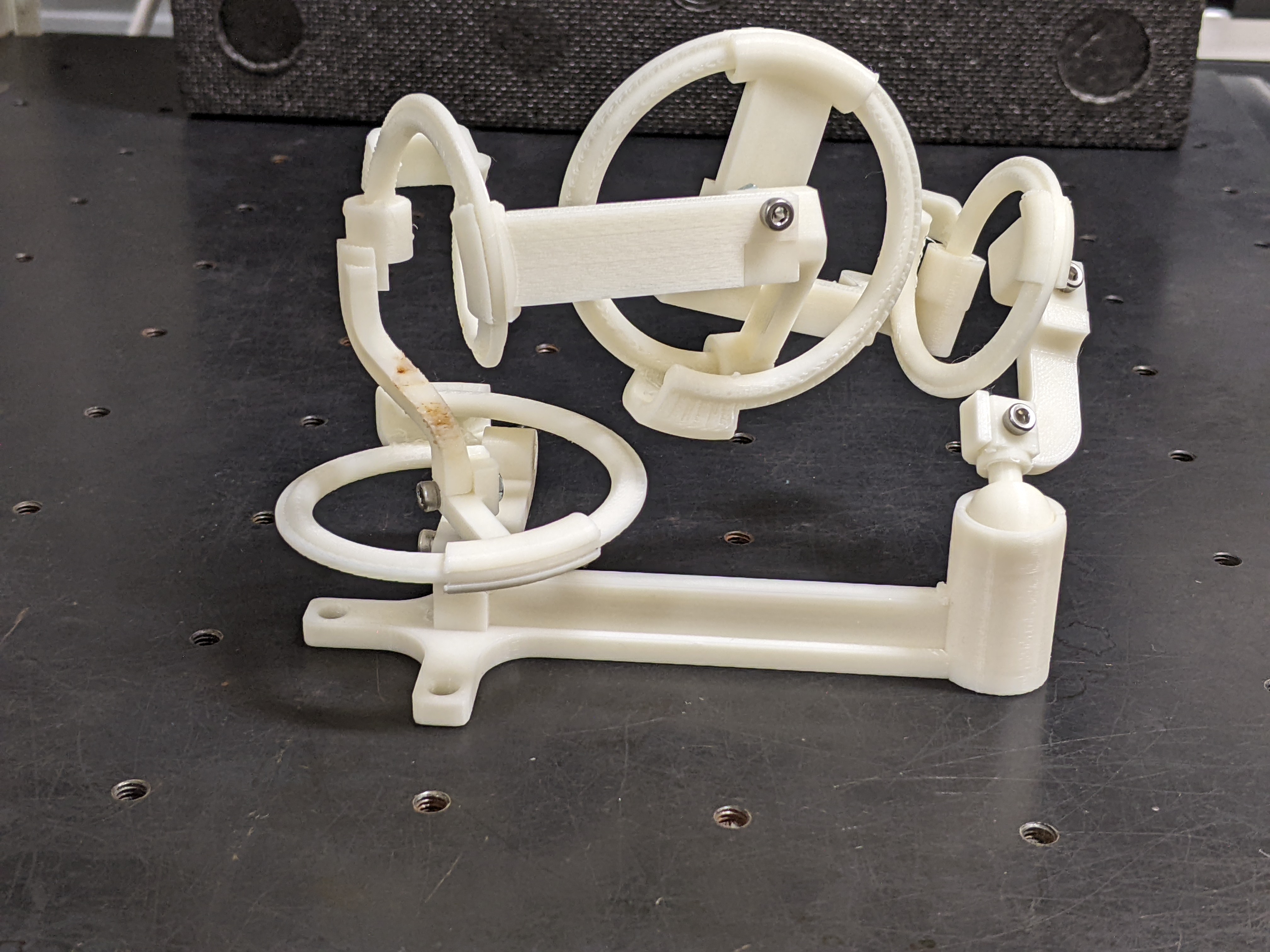
本研究はねじ対偶に焦点を当て,回転対偶,直動対偶では実現できない機構の創成を目指している.特に,図1 に示すようなねじ対偶を用いた閉ループ機構の設計法に取り組んでいる.