2023年度
NoKoSat Mk2
第20回種子島ロケットコンテスト CanSat部門自律制御カムバック出場
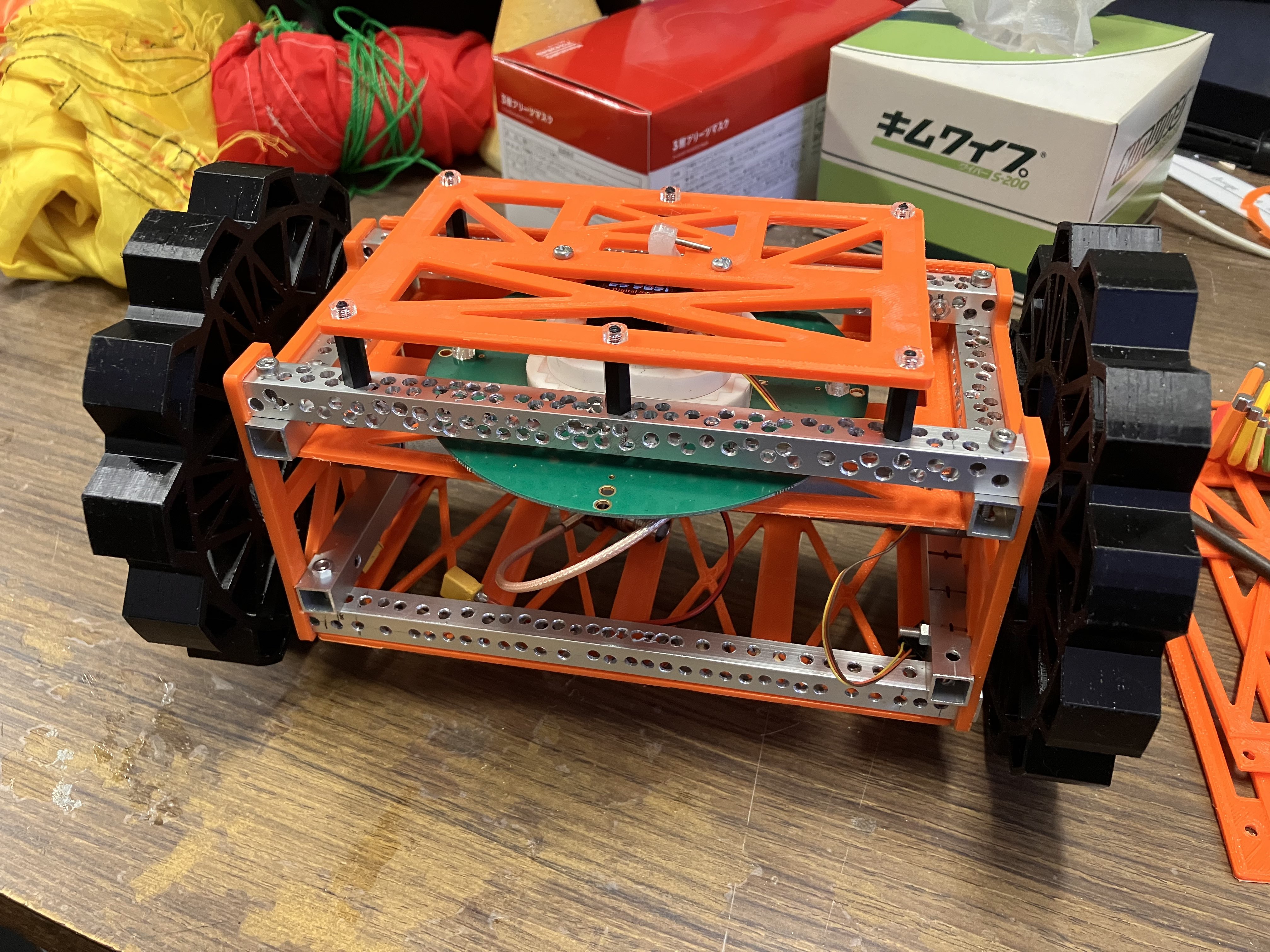
フレームは金属、外壁を3Dプリンターで製作した機体。
機体はその年に入部した編入生とロボ研さんのお力を借りて製作。
フレームに使用したアルミ角パイプの軽量化のための穴あけは徹夜で行いました…。夥しい数の穴があいています。
制御は色々あって当時自操班だった1年生が担当。GNSSとの通信でTXとRXを逆にして数日無駄にするなど雲行きは怪しかったが、
なんとかゴールまでのアルゴリズムを書くことに成功。と思いきや、大会前日に地磁気センサーがうまく動作せず徹夜ですべてのアルゴリズム
を書き換える羽目に…。同室の同期に発表スライドを全投げしてなんとかコードは完成しました。
先輩に開発してもらったラズパイカメラは当日重量制限から載せないことに…。(制御担当が種子島に持って行ったラズパイが実は壊れていて、
偶然持ってきていた同期が生きてるラズパイを持ってた…。)
大会当日も競技直前まで車の中で機体や基板の調整でバタバタ。宿を出発してからパラシュート切り離しのサーボを繋いでいないことに気づき、
慌ててフレームの3Dプリンターパーツを切断しながら接続。プログラムも車の中で書き換えた。
競技自体は、パラシュート展開の衝撃で基板に電源を供給していたジャンパー線が抜けてしまい、着地直後から続行不可能に…。
当時1年生だった部員はジャンパー線なんて二度と使うもんかと思ったとさ。